Kom godt i gang - PhotoRobot brugersupport
PhotoRobot Controls App (yderligere kaldet "CAPP") er designet til at automatisere indholdsproduktionsprocesser (billeder, videoer, 360'ere og 3D-modeller). Denne guide består af 4 sektioner, som hver repræsenterer processen.
- OPSÆTNING - Opret et arbejdsområde: kameraer, hardware og projekter
- CAPTURE - Kontrol PhotoRobot hardware og kameraer, tage billeder og video
- EDIT - Visuelt indhold efter processen
- PUBLISH - Generer outputbilleder i flere formater, "administrer profiler"
Installere app til PhotoRobot kontrolelementer
For at installere PhotoRobot Controls-appen på din computer skal du logge ind på din PhotoRobot-konto og gå til PhotoRobot Downloads.
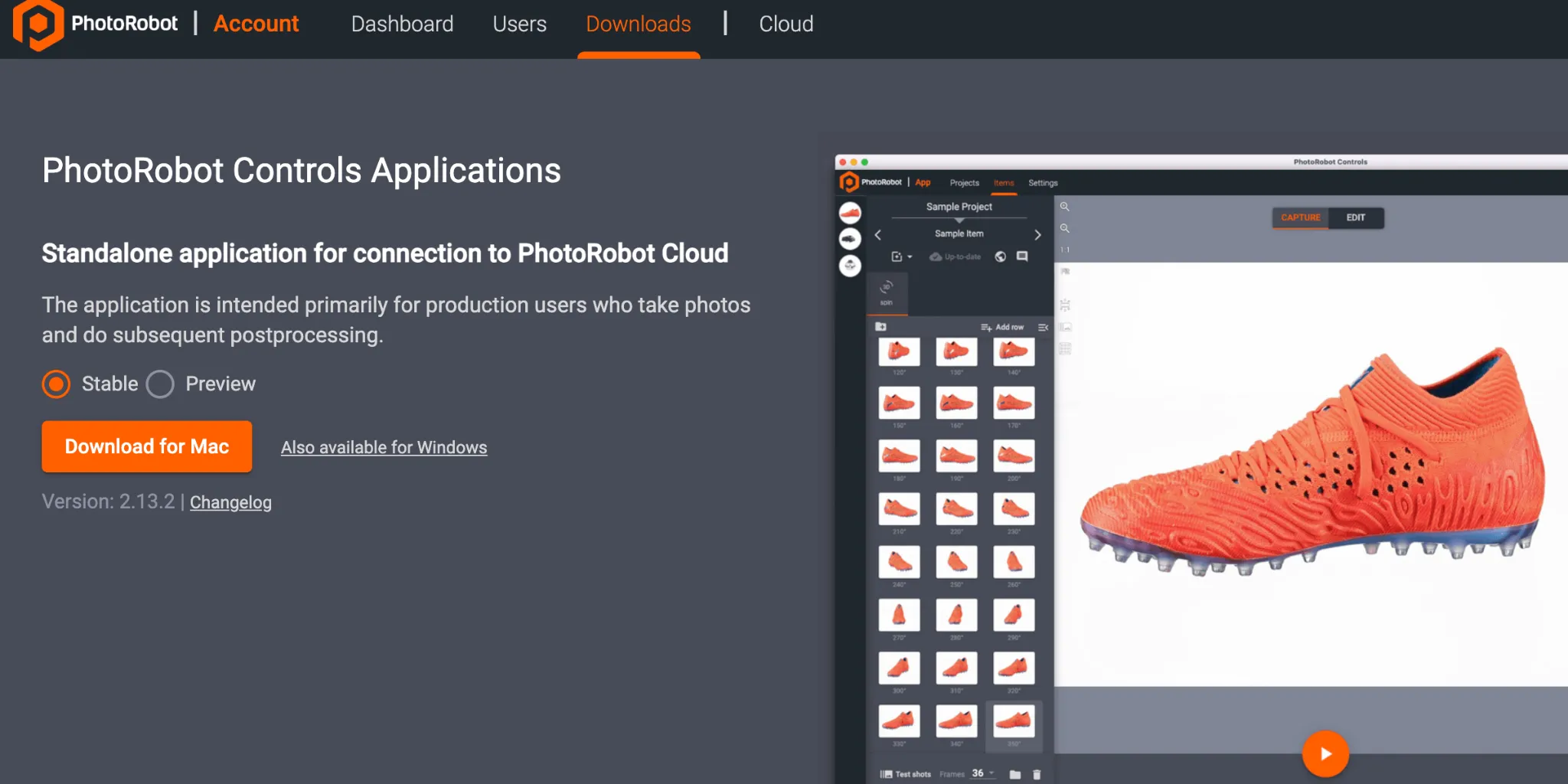
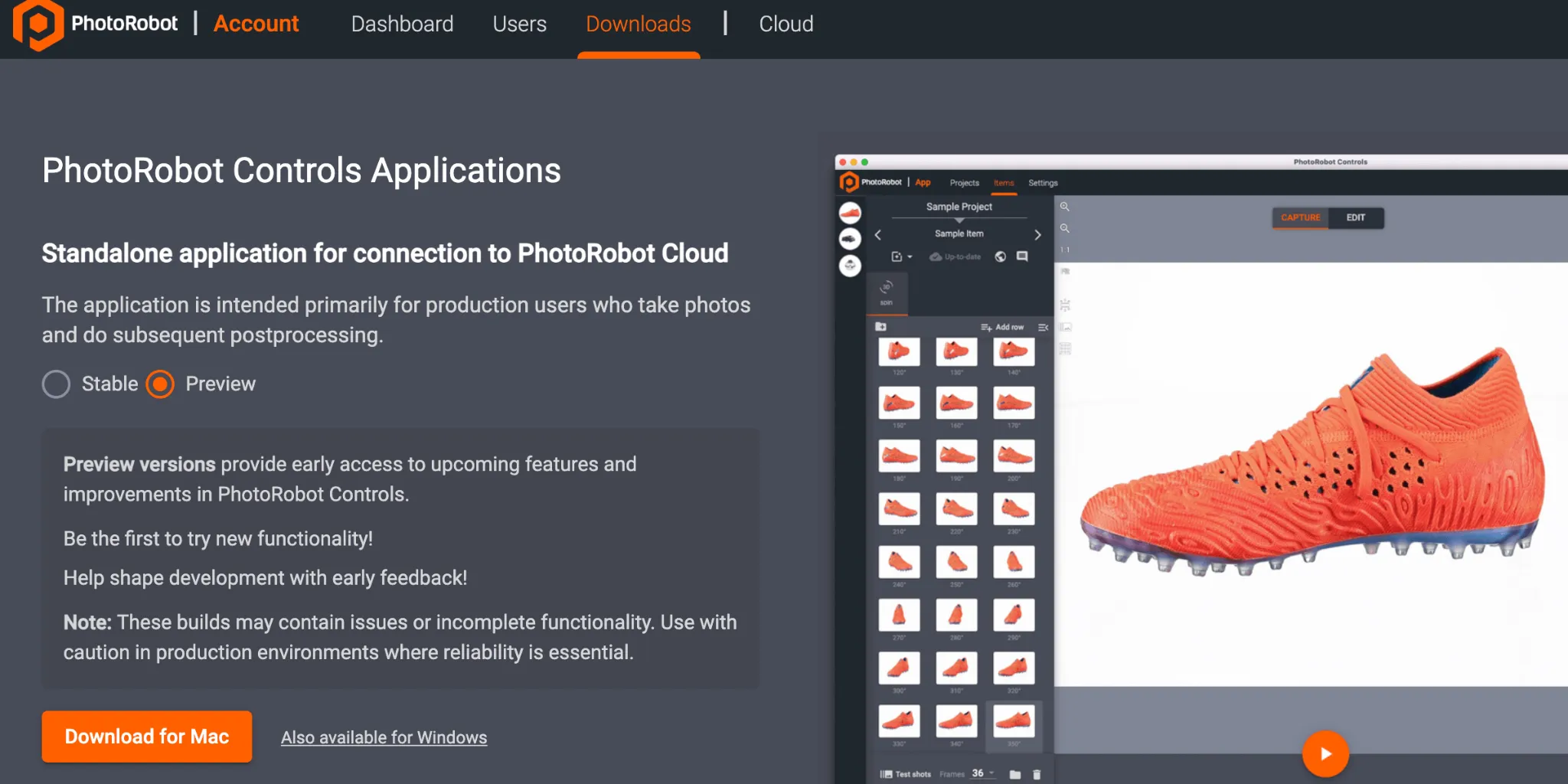
Seddel: Både den stabile version og en forhåndsvisningsversion af CAPP kan downloades via installationsguiden. Den stabile version indeholder den nyeste version af CAPP og modtager hyppige versionsudgivelser. I mellemtiden giver preview-versionen af CAPP tidlig adgang til de allernyeste funktioner og rettelser, som overføres til den stabile version inden for få dage efter udvikling. Dette giver brugerne mulighed for at teste eventuelle problemer, der opstår i preview-versionen, før de kontakter support, da de fleste rapporterede problemer på den stabile version allerede er blevet løst på preview-versionen. Vær dog opmærksom på, at prøveversionen ikke anbefales til produktionsbrug, hvor stabilitet er en kritisk faktor. Prøveversionen er under aktiv udvikling, som stadig kan indeholde ufuldstændige funktioner eller uløste fejl.
Vigtig: De ældre versioner af CAPP er ikke beregnet til kunde- eller offentlig distribution på grund af risikoen for databasekorruption. Ældre versioner af CAPP er kun tilgængelige for autoriserede PhotoRobot-teknikere til intern udvikling eller til ekstremt specielle brugssager.
For at finde den nyeste stabile version og preview-versionen af CAPP, se CAPP Seneste downloadversioner.
Support og fejlfinding til selvinstallation
Installationsprocessen begynder med at downloade installationsfilen.
Bemærk kravene til installation af CAPP:
- Brugeren skal have administratorrettigheder på den computer, der installerer CAPP.
- Computeren skal opfylde alle PhotoRobot system- og hardwarekrav.
- Computeren skal køre et understøttet operativsystem med de seneste opdateringer.
Vigtig: Bemærk også, at CAPP ikke kun består af robotstyringsfunktioner, men også drivere til kameraer, lys og andre perifere enheder. Som følge heraf understøttes den nyeste Mac OS-version ofte ikke med det samme. Men hvis dette sker, er det kun midlertidigt, og indtil alle relevante leverandører frigiver de kompatible biblioteker.
Selvom dette kan være ubelejligt, er det langt mindre ubelejligt end kompatibilitetsproblemer, når du bruger CAPP. Nedgradering er også endnu mere kompliceret end at undgå en for tidlig opgradering.
Efter at have opfyldt OS- og systemkravene, fortsætter installationen derefter via installationsguiden. Log ind på PhotoRobot-kontoen, og fortsæt derefter med opsætningen ved at følge nedenstående trin.
Installationsprogrammet
Bekræftelse af brugersamtykke
Når du downloader CAPP, kræver aktivering af en ny brugerkonto brugerbekræftelse af slutbrugerlicensaftalen (EULA) og andre relaterede dokumenter.
Efter kontoaktivering er det derefter muligt at gennemgå dine indsendte samtykkeoplysninger via Cloud-versionen af CAPP i kontoprofilindstillingerne.
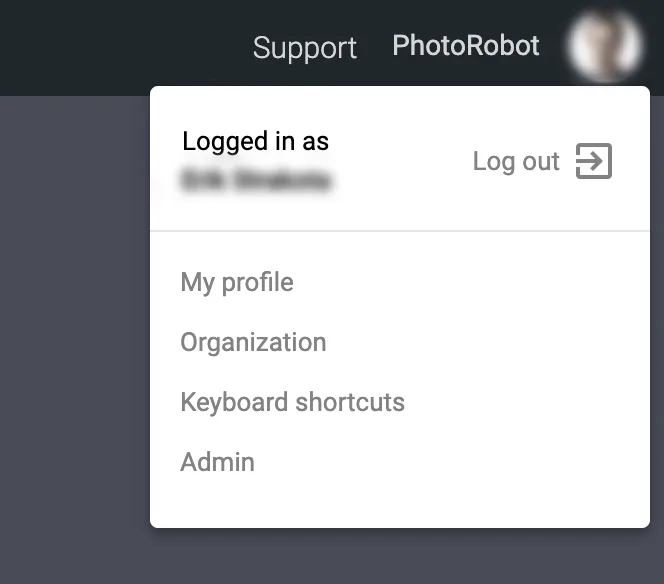
For at kontrollere dine samtykkeoplysninger skal du åbne cloud-versionen af CAPP og klikke på brugerkontoikonet i øverste højre hjørne af grænsefladen. Vælg derefter Min profil fra menupunkterne.

Profilmenuen viser profilbilledet, generelle brugeroplysninger (navn, telefon, virksomhed), adgangskodeindstillinger og samtykkeoplysninger. Samtykkeoplysninger omfatter:
- Computerens værtsnavn
- Godkendt dato
- PhotoRobot International Program Licensaftale
- Samtykke til behandling af personoplysninger
- Oplysninger om behandling af personoplysninger
Kompatible kameraer
Vigtig: For at sikre, at CAPP kommunikerer korrekt med kameraet, skal du lukke alle andre programmer, der opretter forbindelse til kameraet. Sørg også for at bruge et kompatibelt kamera fra listen over PhotoRobot-kompatible kameramodeller.
Bemærk: Fra udgivelsen af PhotoRobot Controls App 2.5.4 kan ethvert kamera nu understøttes via tredjeparts kameraintegration. Dog er de nyeste spejlløse Canon-kameramodeller de mest pålidelige og effektive, når det gælder automatiseret fotografering.
Selvom det er muligt at bruge PhotoRobot foreslåede håndholdte kameraer via Wi-Fi eller kabelforbindelse, kan det skabe problemer.
- Der kan være hyppige Wi-Fi-afbrydelser (primært på grund af timeout). Disse kræver tidskrævende gentilslutninger til systemet.
- Hvis du bruger et håndholdt kamera via kabelforbindelse, er der komplikationer ved kabellængder og risiko for forbindelser.
For iPhone-forbindelse via PhotoRobot Touch-appen, bemærk at ingen af disse problemer opstår. iPhonen vil kunne tage håndholdt fotografering i et setup med kontinuerligt lys. Hvis blitzfotografering dog er nødvendig, kan kompatible håndholdte kameraer fungere som et alternativ til de anbefalede spejlløse kameraer. Husk bare de problemer, der kan opstå med Wi-Fi og kablede håndholdte modeller.
Kompatible lys
For at CAPP kan kommunikere med belysning, skal du sørge for at bruge PhotoRobot-kompatible studielamper. Disse inkluderer to typer lys: strobelys fra FOMEI og Broncolor samt alle typer LED-lys med DMX-understøttelse.
Fjernsupportopsætning
Umiddelbart efter installation af PhotoRobot Controls anbefales det, at brugeren downloader og installerer Splashtop SOS (EU-region) appen. Splashtop SOS (EU) giver PhotoRobot-teknikere adgang til en kundes computer og yde teknisk assistance, efter at brugeren har givet tilladelse til en specifik sag.
At downloade Splashtop SOS samtidig med PhotoRobot Controls vil hjælpe med at undgå forsinkelser ved fjerntekniske supportanmodninger. Tag for eksempel, når en bruger ikke har tilstrækkelige rettigheder til at installere applikationen. Efter installationen af Splashtop kan vores teknikere straks bruge Splashtop Business til at få adgang til computeren med den tekniske supportanmodning.
Vær dog opmærksom på, at brugeren skal downloade EU-region-versionen af Splashtop SOS-appen. Den amerikanske regionsversion tillader ikke vores teknikere adgang til din computer.
Sørg derfor for, at du bruger følgende EU-region link til at downloade Splashtop SOS:
Bemærk: For mere information om opsætning af fjernunderstøttelse af PhotoRobot-systemer, se PhotoRobot Remote Support Setup.
Oprette et arbejdsområde
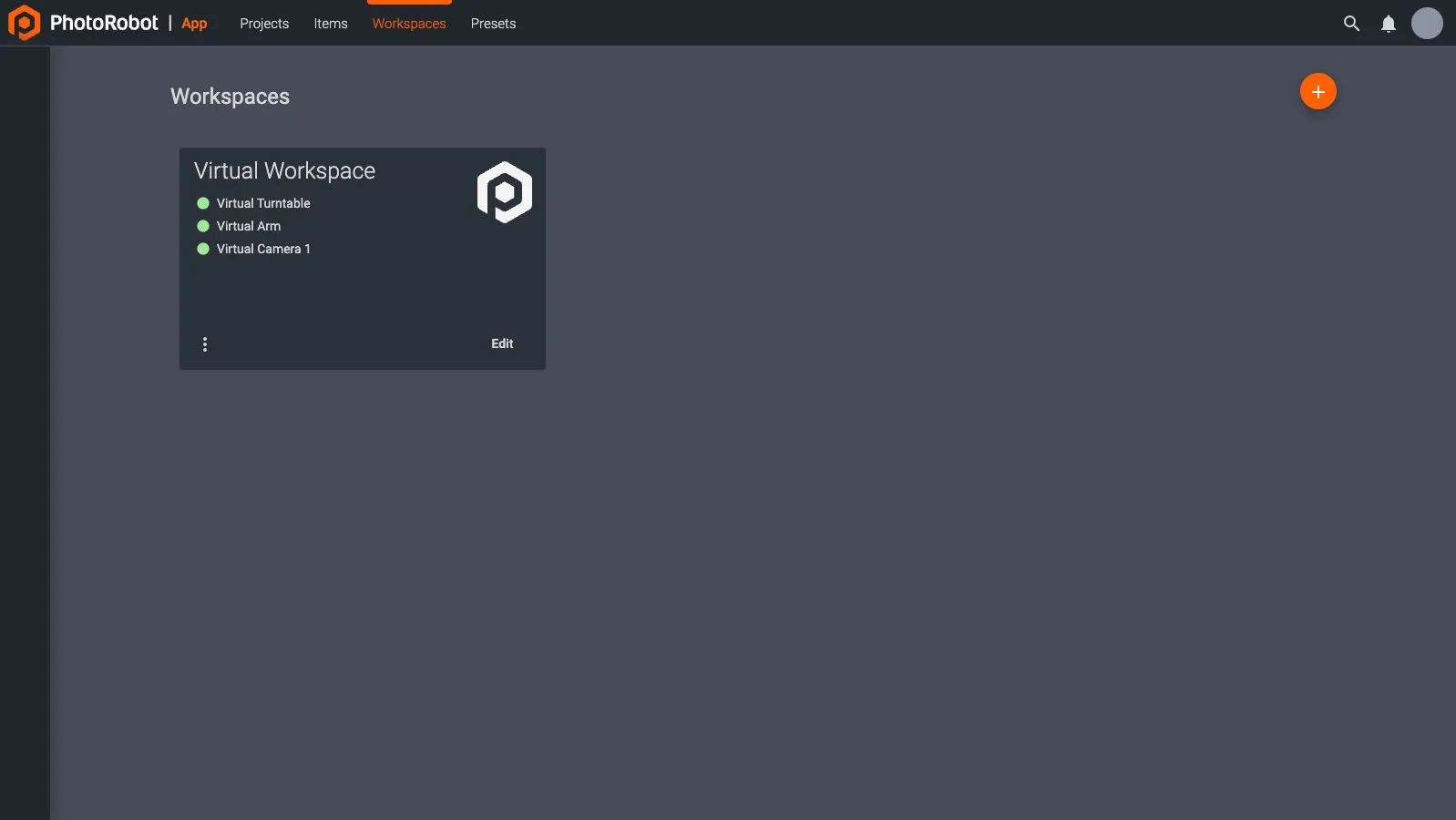
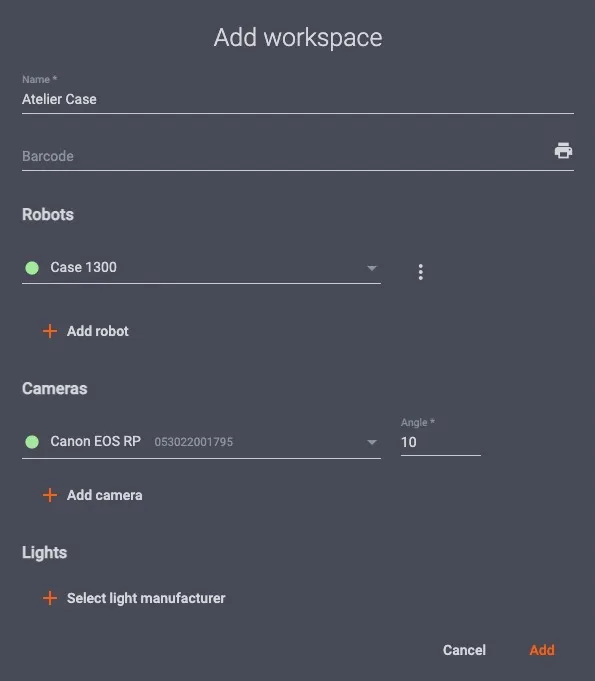
Efter åbning af CAPP er det typisk det første, en bruger gør, at oprette et arbejdsområde. Et arbejdsområde er en liste over hardware, der bruges til en bestemt fotosession. Det kan omfatte forskellige PhotoRobot moduler, kameraer, lys og andet tilbehør.
Til demoformål kan brugerne arbejde med et foruddefineret eksempelarbejdsområde, som er konfigureret til at bruge virtuel hardware. På denne måde kan brugerne stadig eksperimentere med forskellige funktioner i CAPP ved at vælge virtuelle robotter og kameraer.
Opretter forbindelse til hardware
For at begynde at bruge faktisk (i modsætning til virtuel) hardware skal du først sikre dig, at hardwaren er forbundet til det samme computernetværk (eller et undernetværk) som den computer, du bruger til at styre din PhotoRobot.
Bemærk: Fra PhotoRobot Controls version 2.5.4 kan ethvert kamera nu understøttes via tredjeparts kameraintegration. Samtidig omfatter kompatible kameraer en række Canon-kameramodeller, vores anbefalede Wi-Fi-aktiverede Canon-kameraer og også iPhone-kameraer, hvis man bruger PhotoRobot Touch App.
Vigtigt: For automatiseret fotografering med robotarbejdsstation anbefaler PhotoRobot, at spejlløse Canon Camera-modeller er de mest pålidelige. Selvom der er understøttelse af håndholdte kameraer via Wi-Fi eller kabelforbindelse, kan deres brug skabe problemer. Disse inkluderer hyppige Wi-Fi-afbrydelser (primært på grund af timeout), komplikationer med kabellængder og risikoen for forbindelser.
For at tilslutte et kamera skal det være tilsluttet det samme lokale computernetværk som robotten på en af tre måder:
- Direkte forbindelse via USB til lokalnetværket;
- Tilslutning af et anbefalet håndholdt kamera via en særlig Wi-Fi-protokol (tilgængelig i Canons værktøjsprogram på Canons udviklerside);
- Integration af en eller flere iPhones via PhotoRobot Touch-applikationen. (Du kan finde instruktioner om brug af en iPhone med PhotoRobot i brugervejledningen til iPhone Touch-appen.)
Efter at have tilsluttet et stykke hardware (eller kamera) til et arbejdsområde, kan du tjekke, om det er online (genkendt af CAPP). For at gøre dette skal du inspicere prikken til venstre for navnet på det pågældende stykke udstyr. Hvis enheden genkendes, vil der være en grøn prik.
En grå prik ved siden af enhedsnavnet signalerer, at hardwaren ikke blev genkendt eller ikke er tændt. Hvis der er en rød prik, opstår der en fejl, for eksempel at brugeren ikke skifter kameraet til manuel tilstand. For at identificere årsagen til fejlen, hold musen over den røde prik for at vise en tooltip med en beskrivelse af den opståede fejl.
For den komplette trin-for-trin gennemgang af tilslutning af hardware til opsætning af et arbejdsområde, se Setting Up a PhotoRobot Workspace.
Hvis du oplever problemer, henvises der til PhotoRobot Troubleshooting for almindelige problemer og deres løsninger.
Opsætning af robotarmshøjde
Hvis du bruger en robotarm i arbejdsområdet, skal du være opmærksom på, at der sandsynligvis vil være yderligere opsætning påkrævet. Dette skyldes, at robotarmen er en uafhængig maskine, og en af funktionerne ved at styre den via CAPP er, at højdebevægelsen justerer rotationsaksen til midtpunktet af det fotograferede objekts højde.
Højden af robotarmens rotationsakse bestemmes af arbejdsstationens maskintype og samtidig af justeringen af nivelleringsfødderne, som kompenserer for eventuelle ujævnheder i gulvet. Hvis alt er sat korrekt op, er maskinen i vater, og rotationscentret er i en bestemt højde over gulvet. Den samlede højde vil dog også afhænge af højden på pladespillerens overflade, som varierer mellem forskellige robotter. Det betyder, at der kan være en uoverensstemmelse i højdereferencen, da der er en højdeadapter under søjlen på robotarmen, så den nogenlunde justerer.
For at sikre perfekt justering bliver det derefter nødvendigt at indtaste højdeforskellen mellem armen og pladespilleren i CAPP. Højdeforskellen måler den nøjagtige afstand mellem robotarmens rotationsakse og den højde, hvormed pladespillerens overflade er placeret (inklusive eventuelle ekstra plader placeret oven på den). Dette giver de nøjagtige dimensioner, hvorfra systemet beregner halvdelen af objektets højde og den position, hvor armen skal bevæge sig. Det sikrer også, at systemet er indstillet til automatisk og korrekt drift.
Bemærk også: Systemet er indstillet til at afvise værdier, der falder uden for det gyldige interval for en given opsætning.
Sæt Robot Arm-elevatoren til nul niveau
For at sætte Robot Arm-elevatoren til nulniveau, skal du først åbne den lokale version af CAPP, og få adgang til Workspace-indstillingerne på en af to måder:
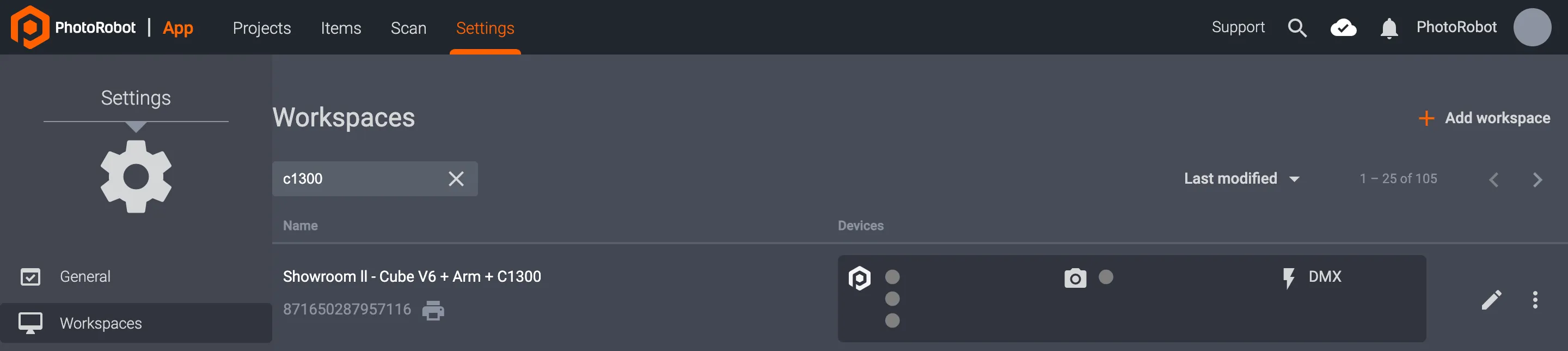
1. Åbn den lokale version af CAPP, klik på Indstillinger øverst i grænsefladen, og vælg Arbejdsområder fra menupunkterne til venstre. I denne menu skal du finde arbejdsområdet i drift, og klikke på redigeringsikonet ved siden af arbejdsområdets titel for at åbne indstillingerne for Rediger arbejdsområde:
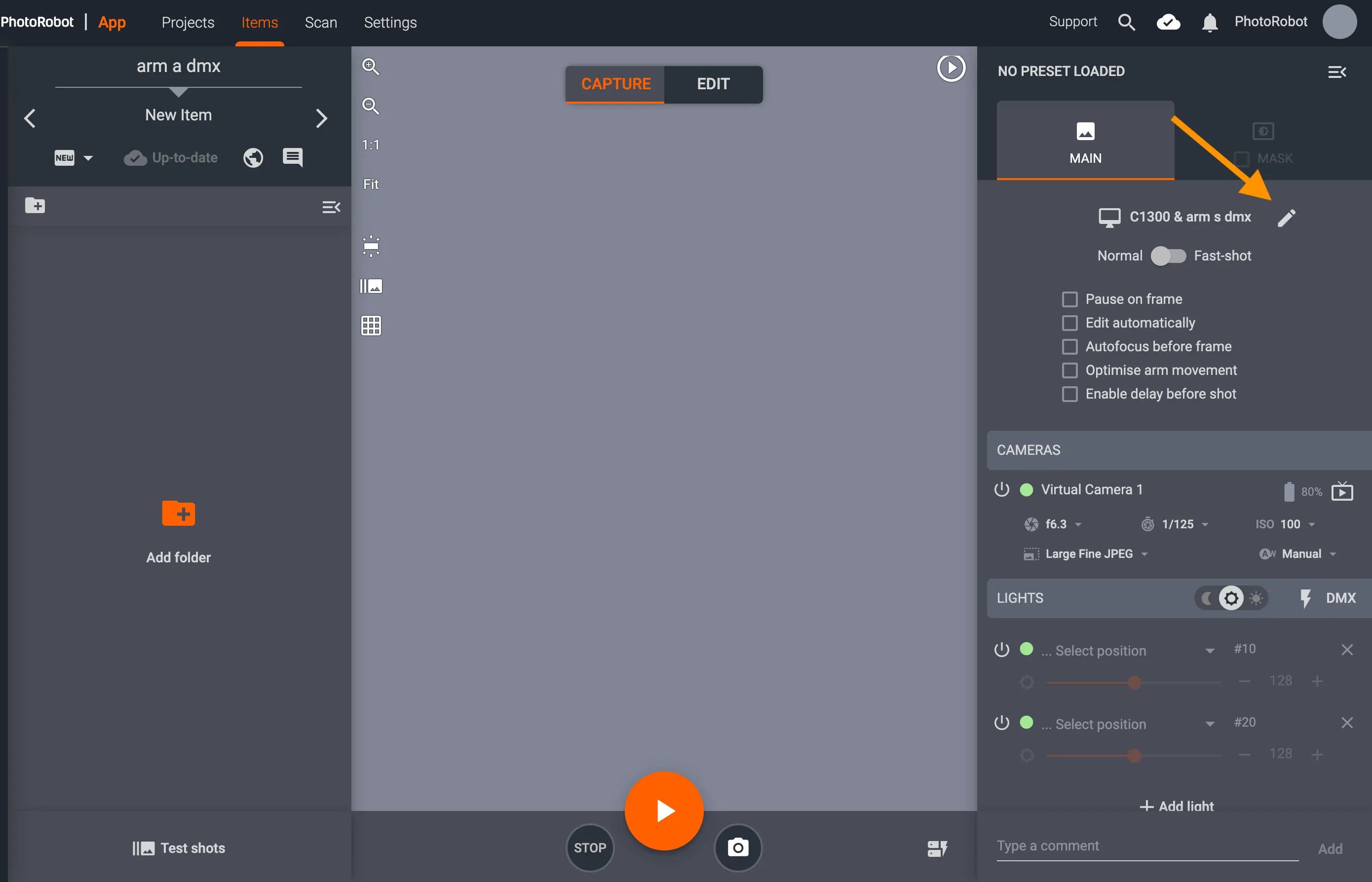
2. Alternativt er det muligt at få adgang til menuen Rediger arbejdsområde ved at åbne et element i Capture-tilstand i den lokale version af CAPP og derefter klikke på redigeringsikonet ved siden af Workspace-titlen i højre side af grænsefladen:
Begge metoder åbner indstillingerne for Rediger arbejdsområde. For at konfigurere robotarmen skal du derefter finde enheden under menuen Robotter og klikke på de 3 lodrette prikker ved siden af robotarmens navn.
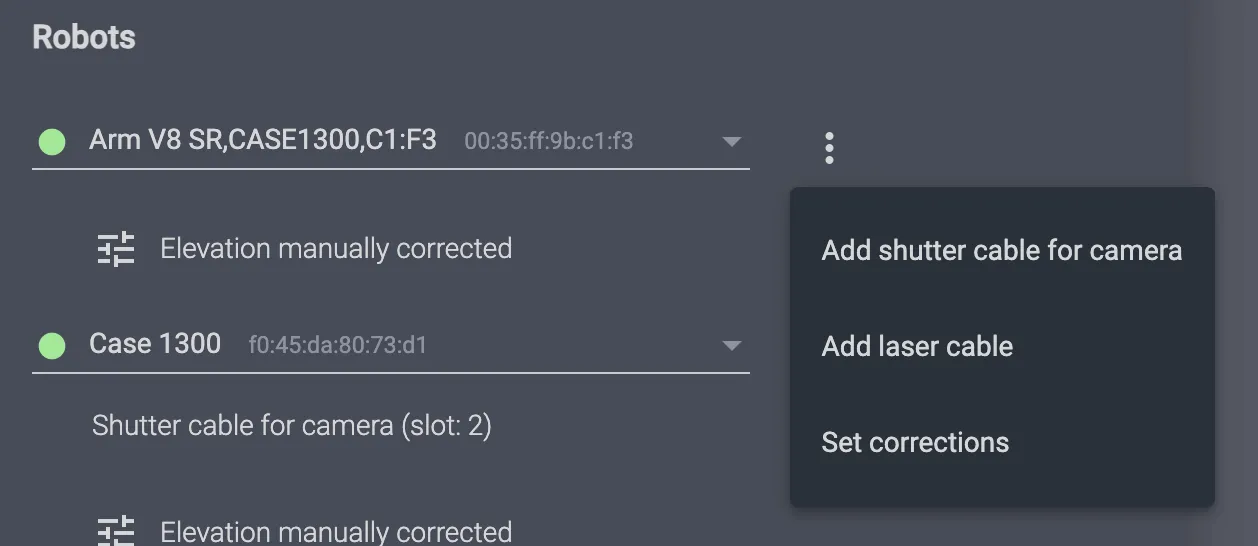
Vælg derefter menupunktet Indstil korrektioner for at åbne funktionen Indstil elevatorkorrektion :
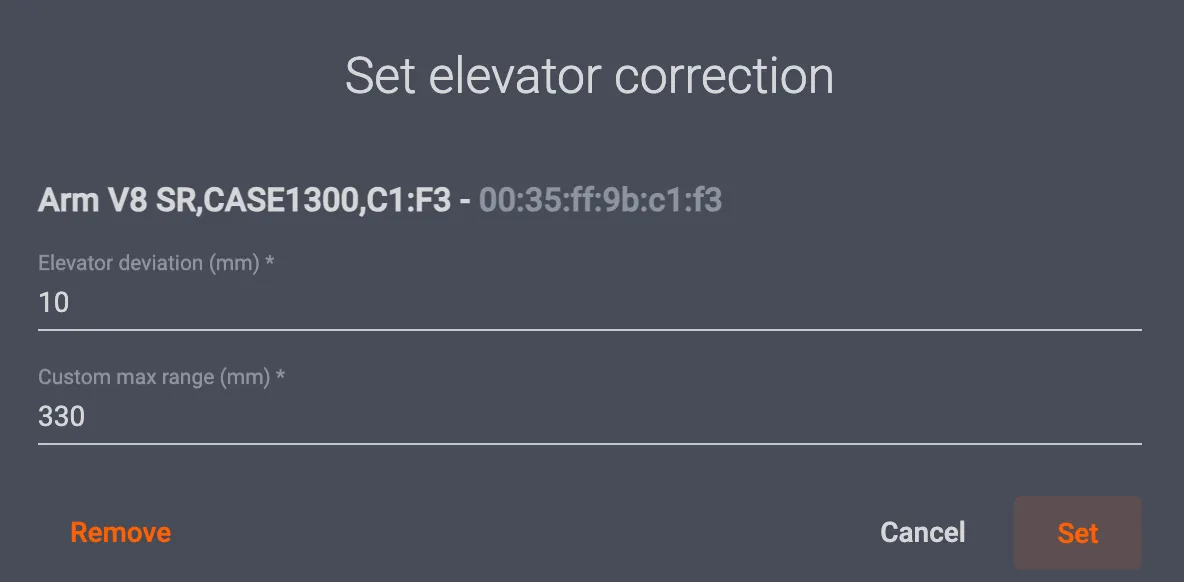
I menuen Indstil elevatorkorrektion skal du justere tallet i det øverste felt Elevatorafvigelse (mm) for at indstille kameraets højde til det passende nulniveau. Hvis kameraet f.eks. er 10 mm forkert over bordet, skal du indstille Elevatorafvigelse til -10 mm for at centrere kameraet.
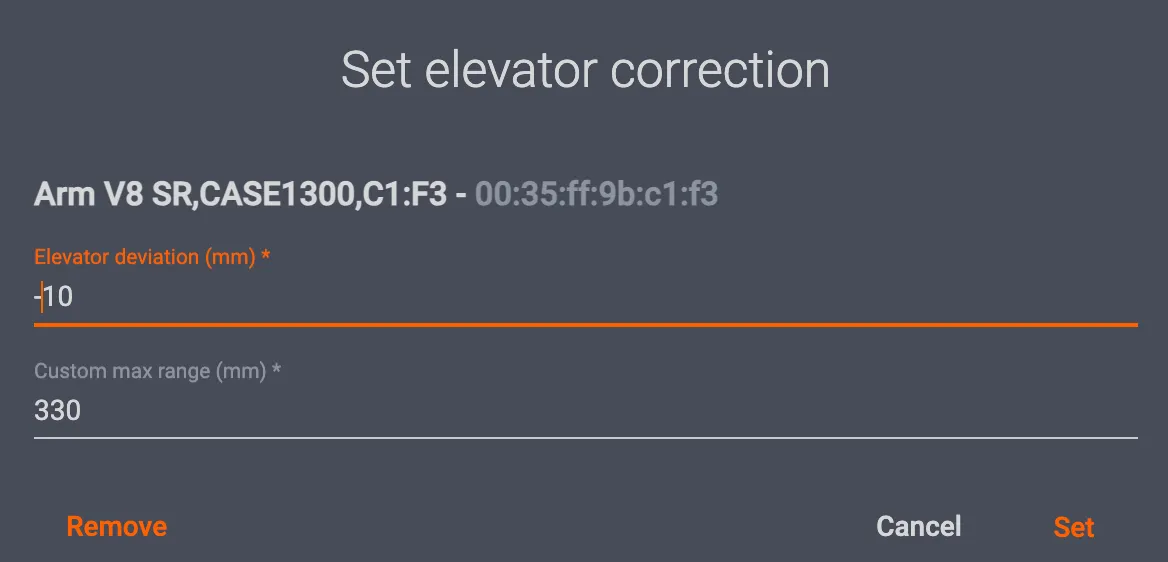
Hvis kameraet er forskudt 10 mm under bordet, skal du indstille Elevatorafvigelse til +10 mm. Dette vil korrekt justere højden af det monterede kamera på robotarmen til det passende nulniveau i softwaren.
Seddel: Liften kan maksimalt nå 330 mm. Hvis nulniveauet justeres med +30 mm, kan det maksimale løft således kun nå 300 mm. Det betyder, at systemet kun vil være i stand til at fange produkter, der er mindre med denne margin, 30 mm eller mindre.
Administration af filer - Projekter, elementer og mapper
I CAPP er billeder organiseret i projekter, emner og mapper.
- Et projekt er dataobjektet på højeste niveau. Typisk vil et projekt indeholde elementer fra en enkelt fotosession eller måske en enkelt optagelse dag / uge.
- Projekterne består af et eller flere elementer. Et enkelt element vil typisk være et bestemt, fotograferet objekt.
- Et element indeholder en eller flere mapper. I CAPP kan du have flere mapper i et enkelt element for at holde forskellige slags billeder adskilt. Et meget almindeligt eksempel er at have en mappe til en 360° roterende præsentation (kaldet "spin"), mens du bruger en anden til at gemme stillbilleder ("stillbilleder").
For at begynde at skyde skal du først tilføje et nyt projekt (medmindre du allerede har et, du gerne vil bruge), samt mindst et element.
( ! ) - Hvis du oplever problemer, kan du finde yderligere support til tilslutning af kameraer, robotter, lys og redigering i PhotoRobot fejlfindingsmanual.
Generelle indstillinger - Cloud Auto Backup, Processing, Touch App
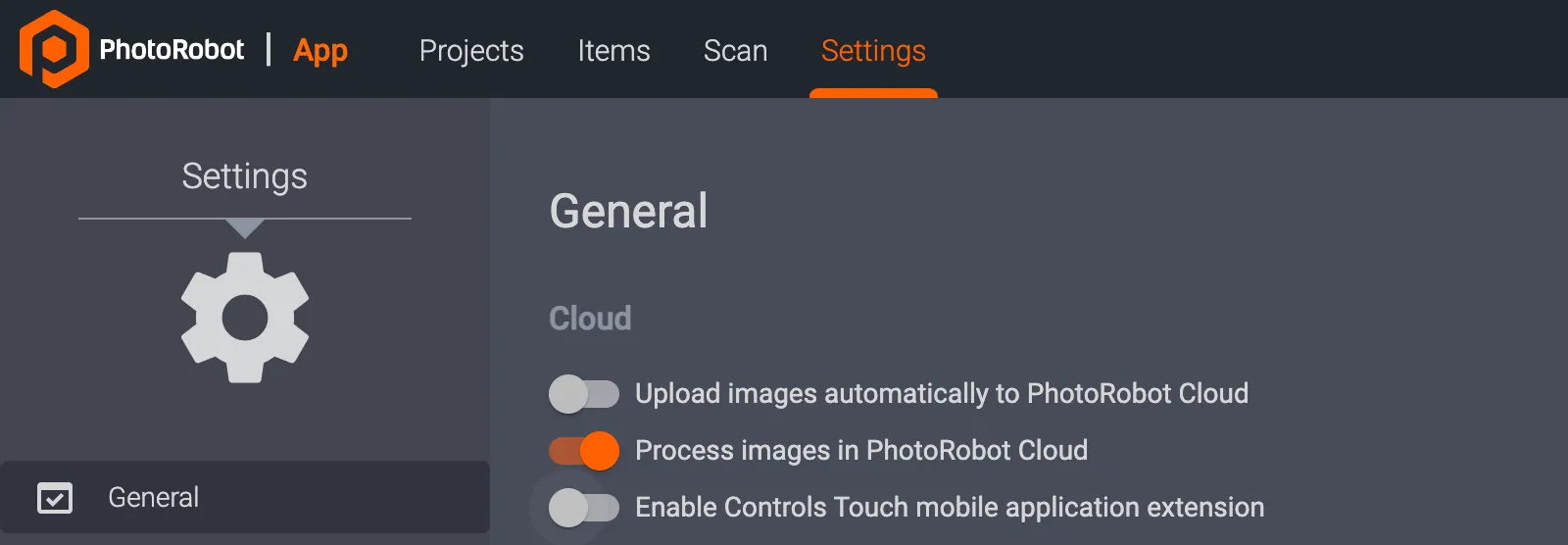
I den lokale desktopversion af CAPP er der 3 generelle indstillinger, der skal slås til eller fra:
- Upload billeder automatisk til PhotoRobot Cloud
- Behandl billeder i PhotoRobot Cloud
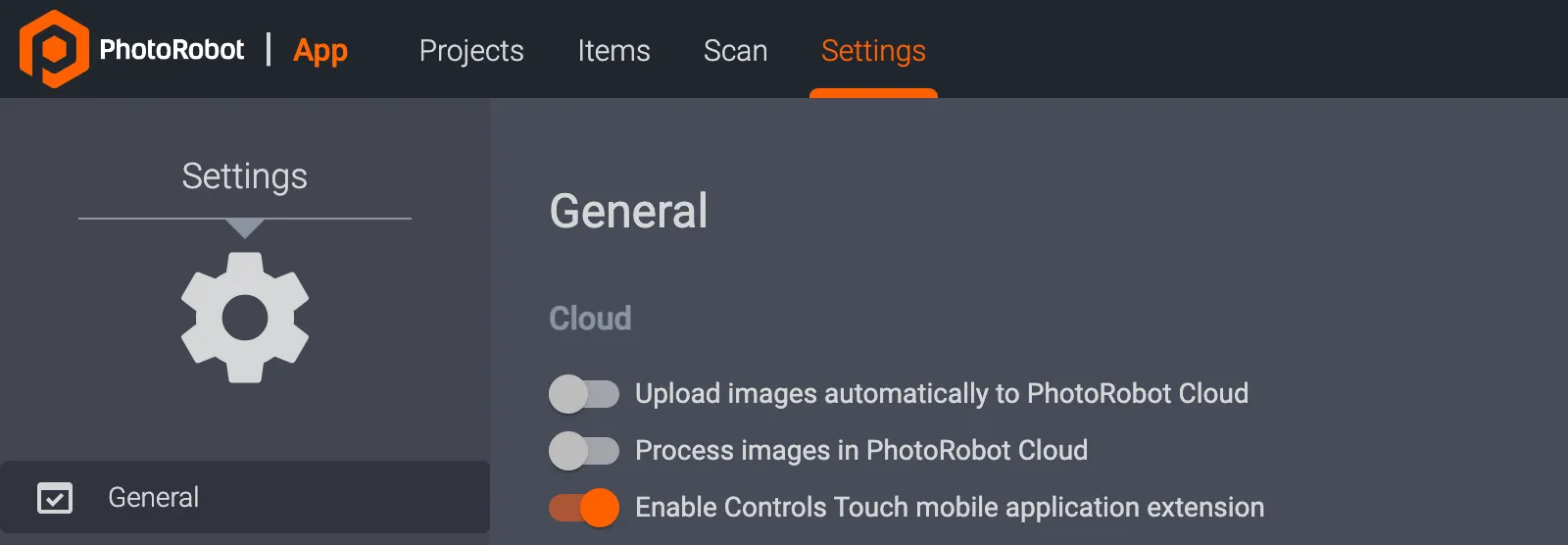
- Aktiver kontrolelementer Touch Mobilappudvidelse
Som standard vil den lokale app være indstillet til Upload billeder automatisk til PhotoRobot Cloud. Denne funktion gemmer automatisk en sikkerhedskopi af optagne billeder på din cloud-server til senere eksport.
For at deaktivere Upload billeder automatisk til PhotoRobot Cloud skal du slå indstillingen fra i den lokale version af CAPP's generelle indstillinger. Dette gemmer i stedet registrerede elementer i din lokale app eller på din egen cloudkonto.
Brug også skifterne til at aktivere eller deaktivere funktionen Behandl billeder i PhotoRobot Cloud. Når den er slået til, efterbehandler denne funktion automatisk billeder i henhold til forudindstillinger i PhotoRobot Cloud efter optagelse.
Hvis du bruger PhotoRobot Touch-mobilapplikationen til iPhone, skal du slå Aktiver kontroller Touch Mobile-applikationsudvidelse til.
Seddel: For tekniske instruktioner om installation og betjening af PhotoRobot Touch, se brugervejledningen til PhotoRobot iPhone Touch App.
Generelle indstillinger - Opret automatisk ny vare
Derudover er der i de generelle indstillinger i den lokale desktopversion af CAPP stregkodescannerindstillingerne , som muliggør konfiguration af avancerede indstillinger for stregkodelæseren. Brug til/fra-knappen til venstre for Opret automatisk et nyt element i systemet, når en ukendt stregkode scannes for at aktivere eller deaktivere automatisk oprettelse af element.
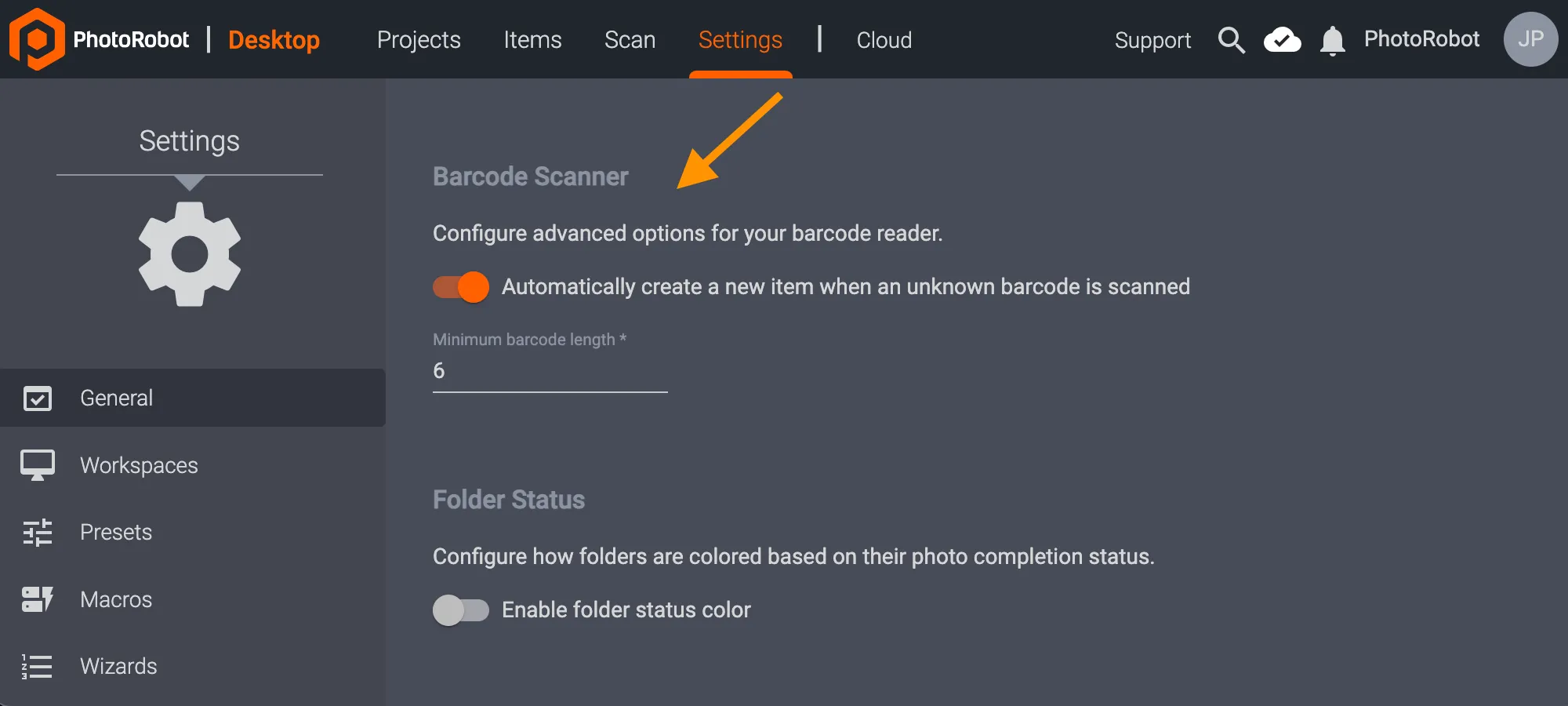
Når indstillingen er aktiv, fungerer den som et alternativ til manuel oprettelse af varer. Det muliggør identifikation af en genstand på fangststedet (typisk via stregkode eller QR-kode). En operatør scanner blot en ukendt kode, og der oprettes automatisk et nyt element i projektet. Navngivningen af elementet sker i henhold til den scannede streng og i elementets id-felt. Derefter fotograferer operatøren varen.
På denne måde er der ingen grund til at udføre nogen lagerrelaterede operationer i studiesoftwaren. For eksempel er det nok at scanne et nyt emne og efterfølgende scanne en forudindstillet (hylde) kode til fotograferingen (f.eks. til hvide, mørke eller farverige genstande). Systemet vil derefter automatisk og øjeblikkeligt levere et komplet sæt fotografier, efterbehandle dem fuldt ud og distribuere dem med automatisk navngivning til målsystemet.
Fra og med CAPP version 2.13.beta58 er der nu mulighed for at konfigurere den mindste strenglængde for stregkoder. Tidligere var den mindste stregkode/QR-kodelængde 6 tegn (for at undgå dobbeltfortolkninger af den scannede streng blandt andre problemer). Nu kan indstillingen Minimum stregkodelængde justeres, så f.eks. identifikatorer på fire tegn kan fungere uden behov for yderligere justeringer.
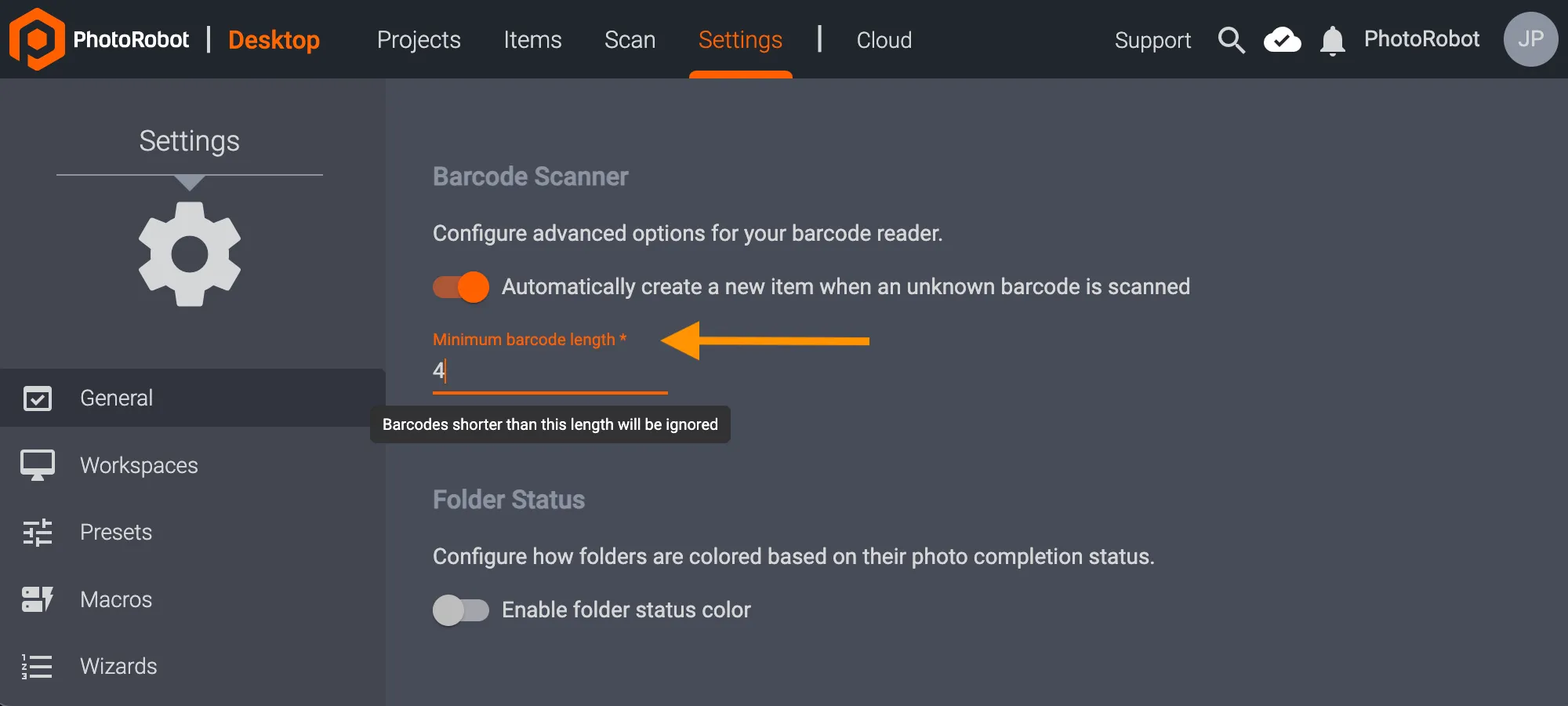
For at justere den mindste strenglængde for stregkoder / QR-koder skal du også konfigurere den mindste stregkodelængde i den lokale version af CAPP i Generelle indstillinger - Stregkodescanner. Stregkoder, der er kortere end længdeinputtet, vil derefter blive ignoreret af systemet.
Seddel: Når en vare er blevet tildelt en stregkode i systemet, vil stregkoden også være tilgængelig direkte i Capture-tilstandsgrænsefladen i Item-informationsområdet via en stregkodeknap.
Tildeling af ekstern adgang til projektdata for kunden
For at arbejde med kunder uden for organisationen af en betalt CAPP-konto kan en administrator af kontoen oprette klientkonti gratis. Kundekonti gør det muligt for en ekstern kunde at se projektdata, deltage i kvalitetssikring gennem gennemgang og kommentarer og få adgang til projektaktiver til download. Denne funktion er beregnet til situationer, hvor et fotostudie arbejder med en ekstern kunde, der har brug for adgang til bestemte job.
For at dele et projekt med en kunde uden for din organisation skal du først sikre dig, at du logger ind på cloud-versionen af CAPP ved hjælp af en brugerprofil med administratorrettigheder.
1. Log ind på den skybaserede app ved hjælp af en betalt CAPP-kontoprofil med administratorrettigheder, og klik på brugerprofilmenuikonet i øverste højre hjørne af dashboardet. Klik derefter på Organisation for at få adgang til administrationspanelet.
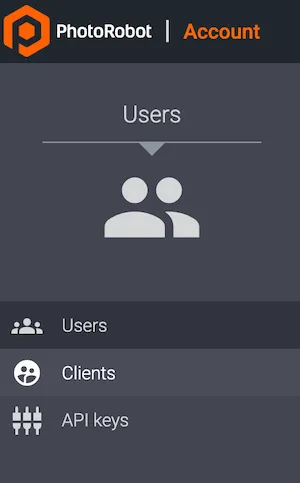
2. Klik derefter på Brugere fra kontoindstillingerne øverst i brugergrænsefladen fra panelet Organisationsadministration.

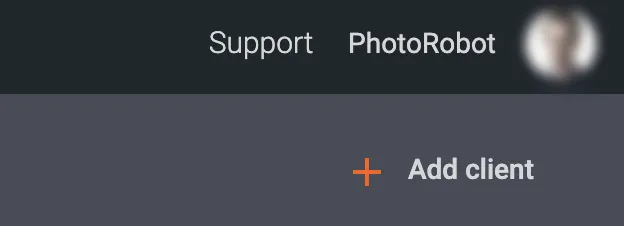
3. Klik på Klienter for at oprette en ny brugerindstilling for at få adgang til funktionen Tilføj klienter fra kontogrænsefladen. Knappen + Tilføj klienter vises øverst til højre på dashboardet under brugerprofilikonet.
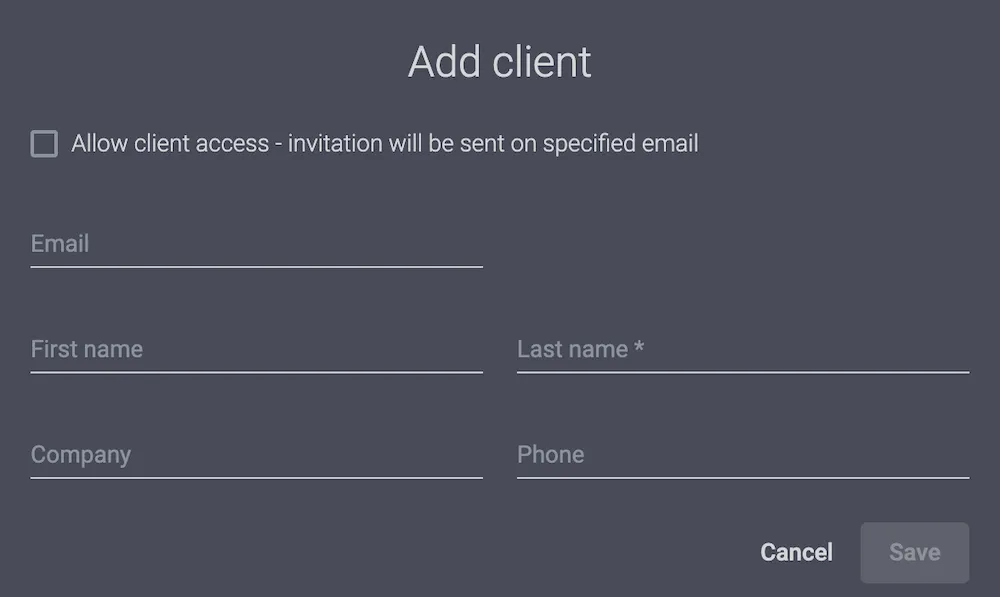
4. Klik på + Tilføj klient under brugerprofilikonet.
5. Udfyld felterne for kundens oplysninger (e-mail, navn, firma, telefon), og marker afkrydsningsfeltet Tillad klientadgang. Gennemgå oplysningerne for nøjagtighed, og klik på Gem for at føje klienten til CAPP.
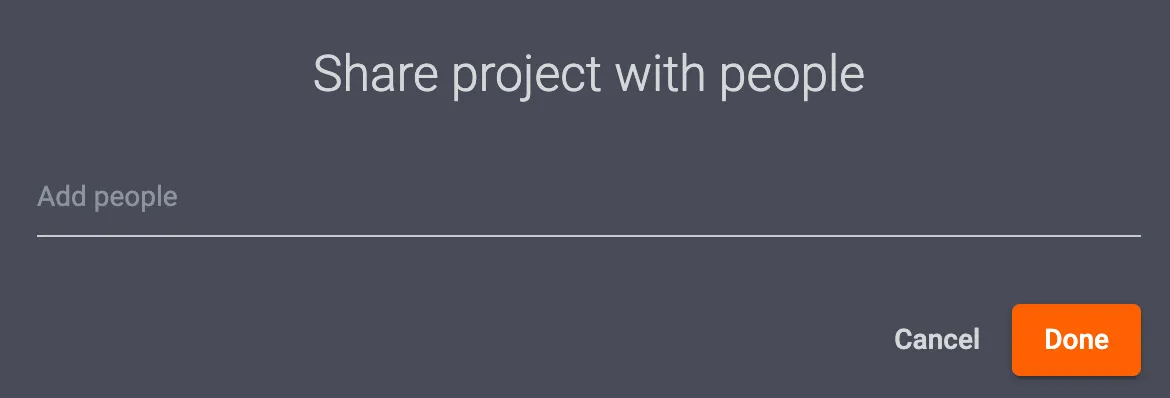
6. Åbn Projekter i cloud-versionen af CAPP, find det projekt, du vil dele med den gemte klient, hold musen over projektlinjen, og klik på deleikonet til højre for projektdetaljerne.
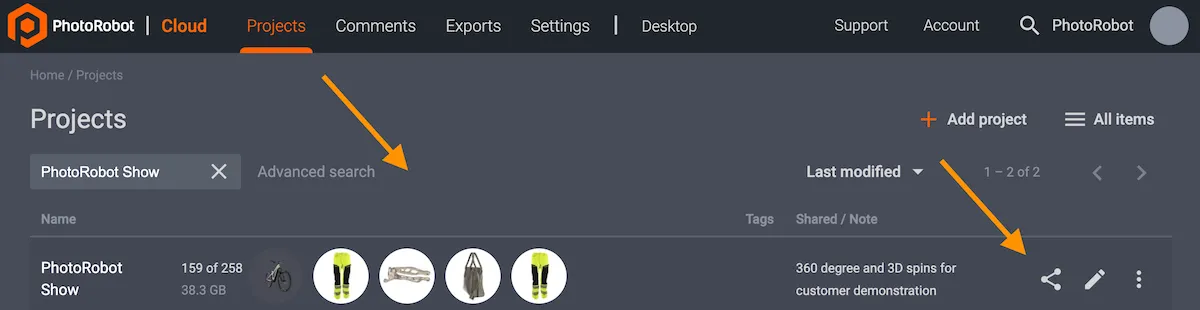
7. Klik på deleikonet i højre side af projektlinjen for at åbne funktionen Del projekt med personer , vælg gemte kunder, og klik på udført. Projektet deles nu med kunden, så de kan se jobbet og kommentere i CAPP for kvalitetssikring og yderligere instruktioner, hvis det er nødvendigt.
Grænseflade til hentningstilstand
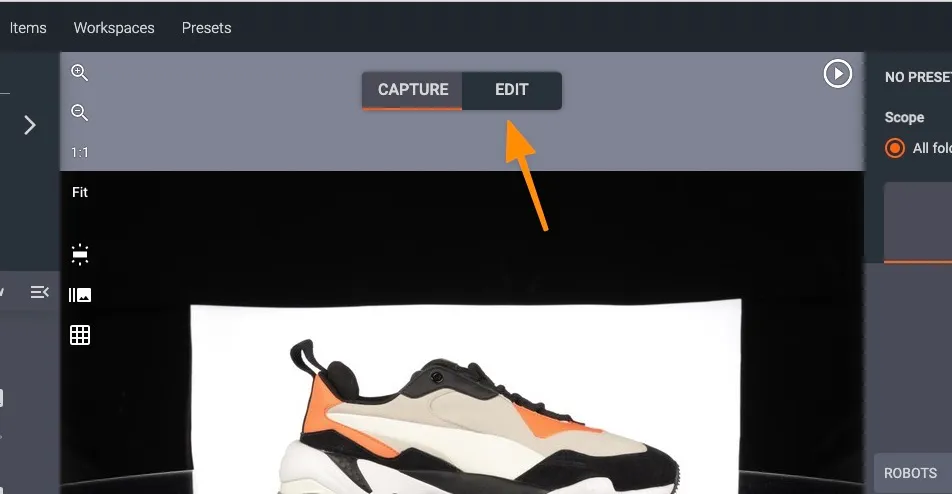
Når du har klikket på et element, vil du blive ført til en capture / edit interface. De kontrolelementer, du har til rådighed, ændrer sig, afhængigt af om hentningstilstanden er aktiv, eller redigeringstilstanden . Hentningstilstanden bruges til at styre fotograferingssekvensen, mens redigeringstilstanden styrer al efterbehandling, der udføres i CAPP. Den aktive tilstand fremhæves øverst på skærmen:
Tilføje en spins-, still- eller videomappe
Før en fotosession skal du oprette mindst én mappe. De vigtigste typer mapper er spin (bruges til 360 ° præsentationer), stillbilleder (til stillbilleder) og video (til videoer).
Oprette en spins-mappe
Når du tilføjer en spin-mappe, tilføjer CAPP automatisk stop (også kaldet "frames") baseret på hvor mange billeder pr. spin du vælger. Standardnummeret er 36, og dette kan ændres i nederste venstre hjørne. Med et højere antal stop bliver rotationen glattere, men det vil også tage mere lagerplads.
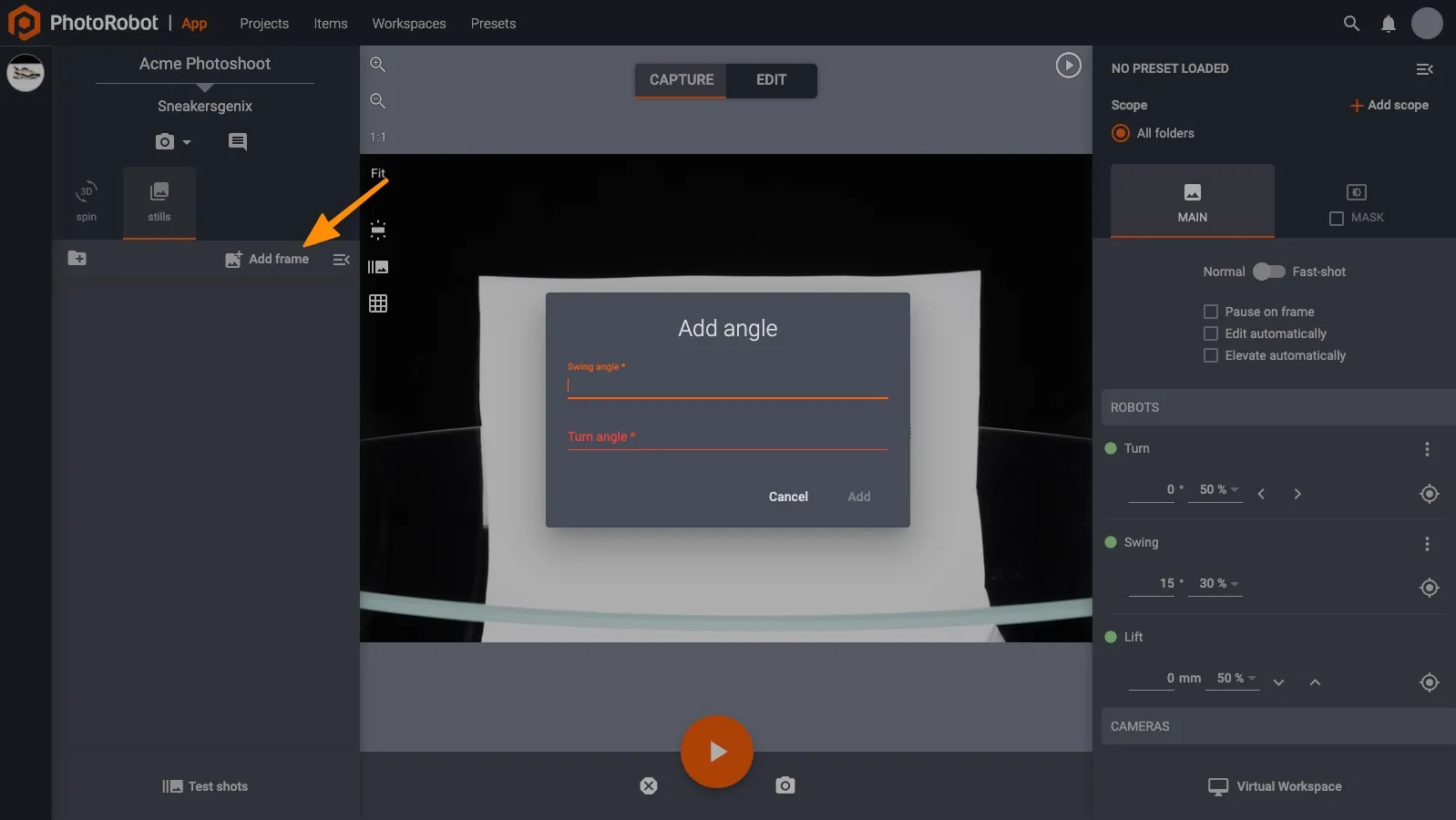
Oprette en Stills-mappe
Hvis du vælger en stillsmappe, skal du tilføje stop manuelt. Dette vil omfatte en svingvinkel (rotationsvinklen) og en svingvinkel (kameraets lodrette position langs en cirkulær bane). Svingvinklen er vigtig, hvis du bruger vores robotarm eller et andet modul, der kan ændre kameraets vandrette position.
Importer billeder
I nogle tilfælde vil du måske importere billeder til en ny eller eksisterende mappe i CAPP. Tag for eksempel import af håndholdte fotos, detaljerede billeder eller andre forskellige billeder.
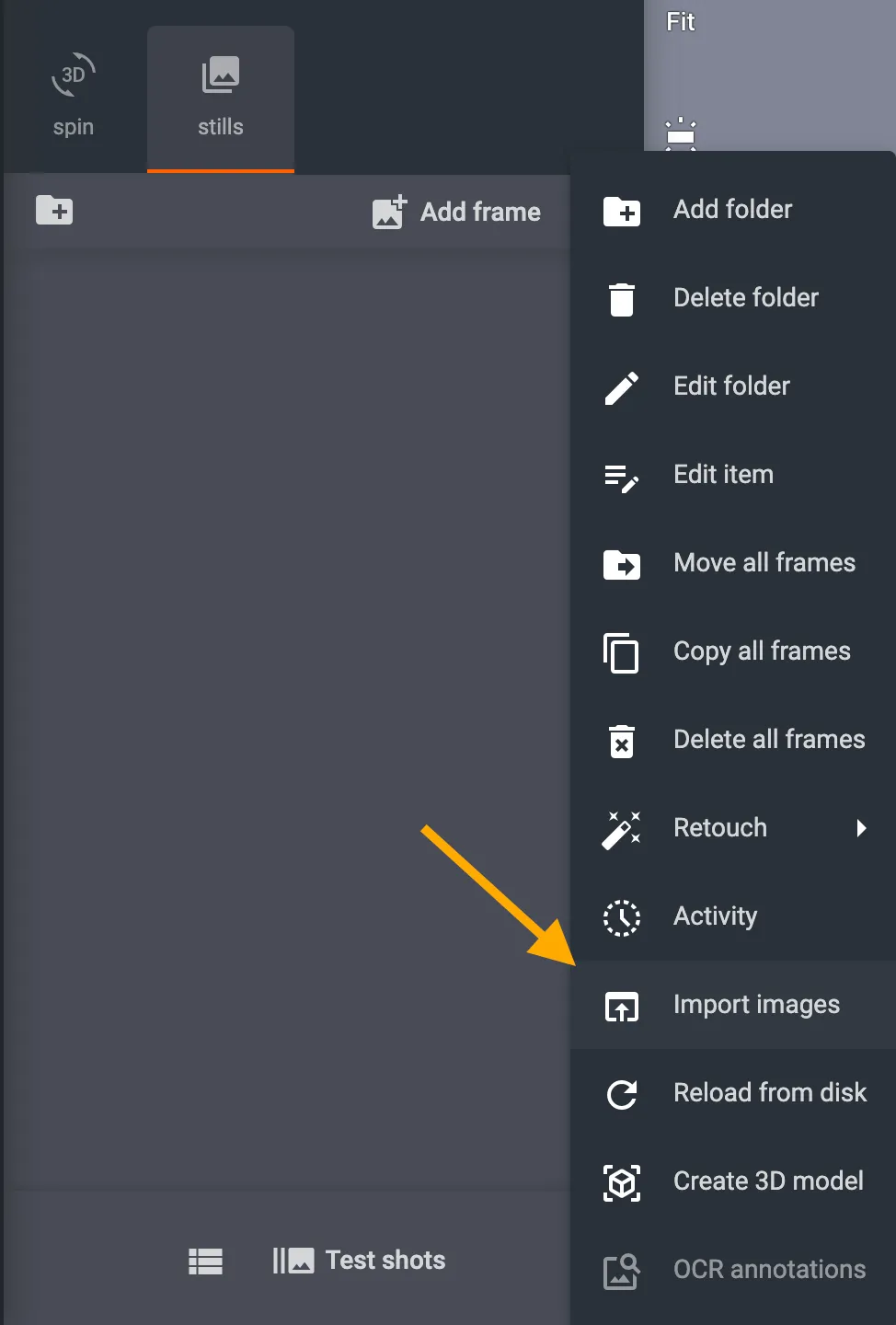
For at importere billeder til CAPP skal du først åbne et nyt eller eksisterende element i Capture mode-grænsefladen i CAPP. Klik derefter på ikonet for mappebetjeningsmenuen i øverste højre hjørne af mappegrænsefladen.
Find og klik derefter på Importer billeder fra listen i menuen for mappebetjeningsmenuer.
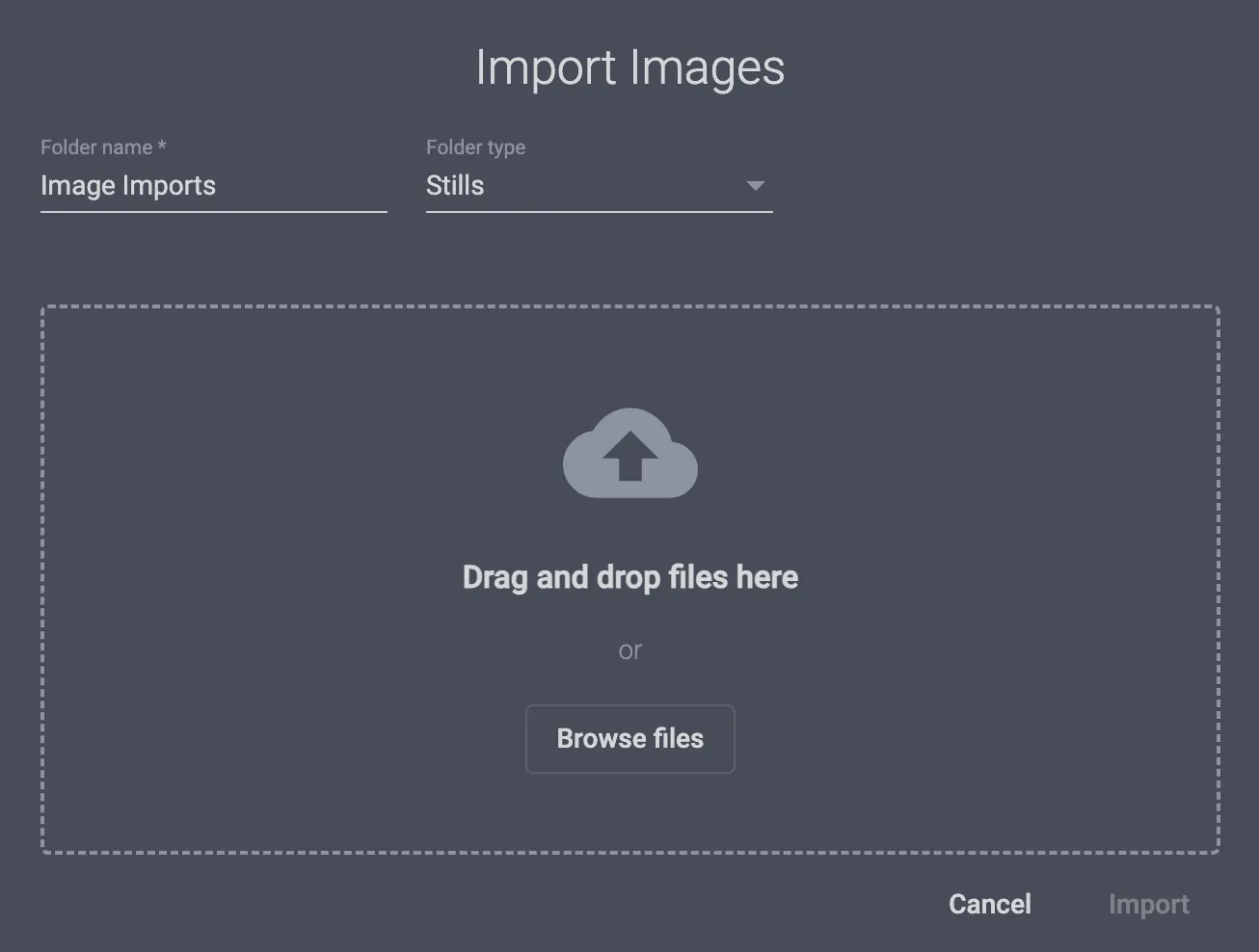
Hvis du klikker på Importer billeder, åbnes et pop op-vindue, der muliggør billedimport ved at trække og slippe eller ved at gennemse lokale filer. Øverst i vinduet er det også muligt at konfigurere mappenavn og mappetype for de importerede billeder.
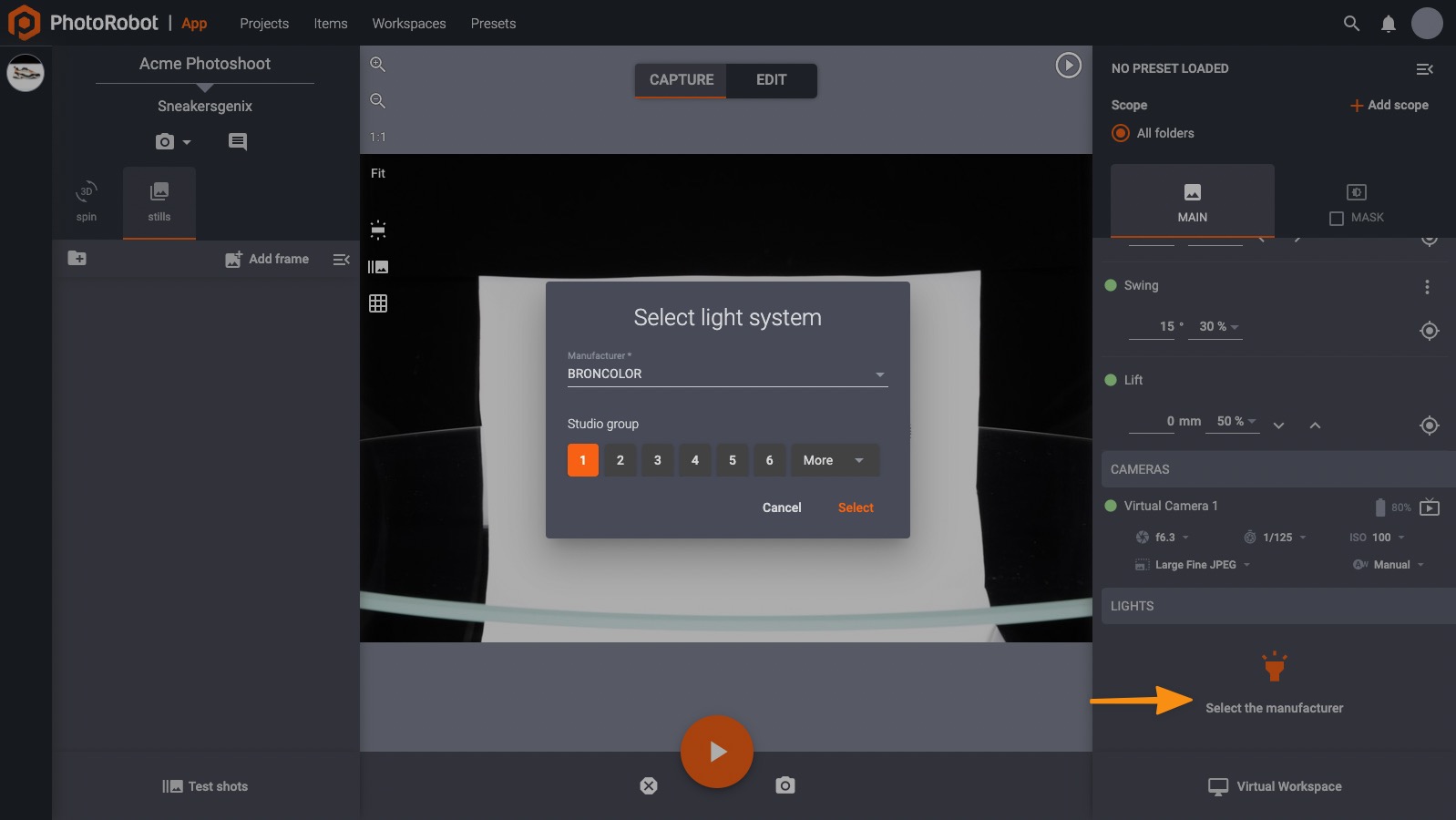
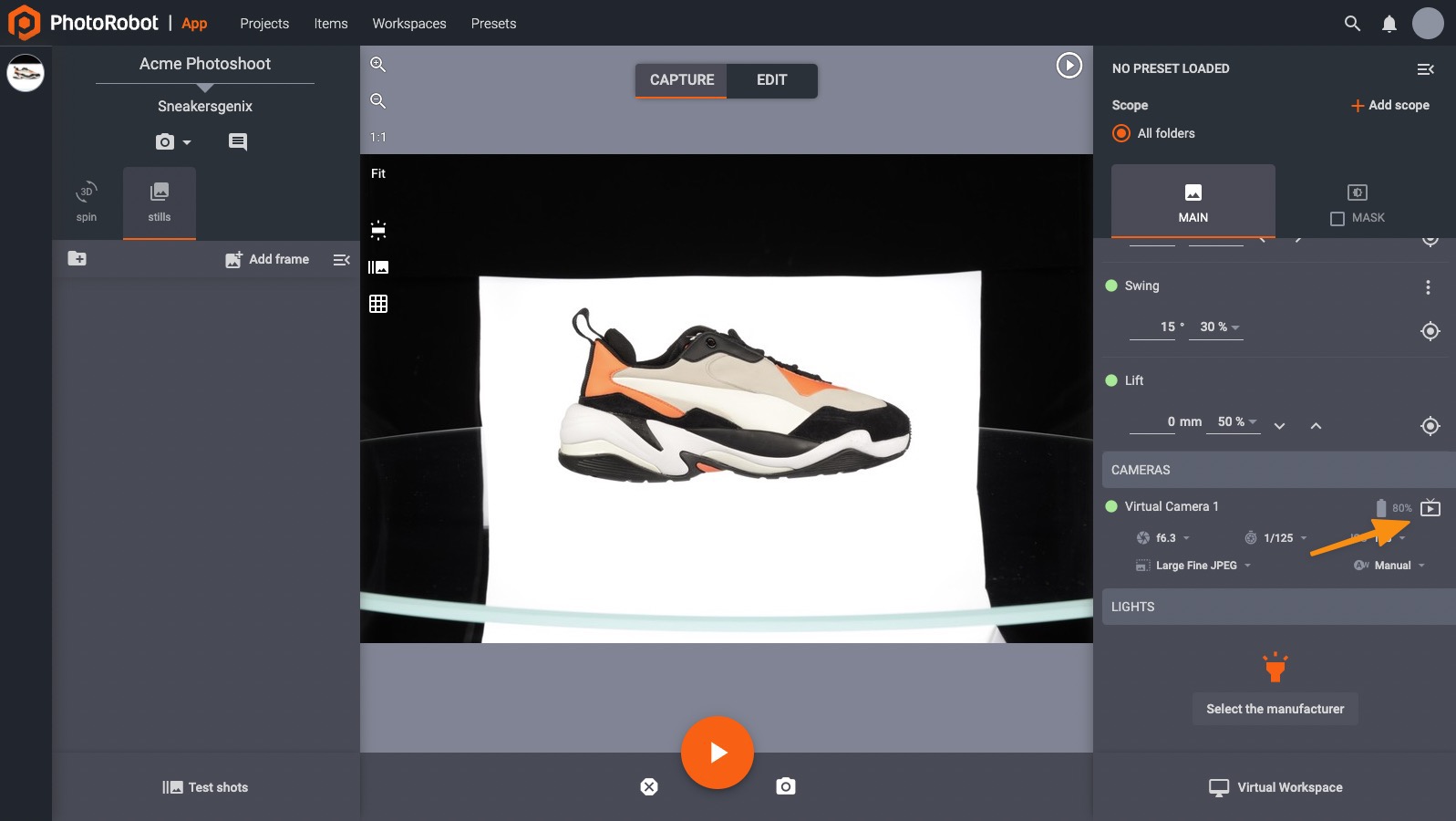
Kontroller kompatible lys
Når du bruger lys, der er kompatible med CAPP, kan du vælge lys i nederste højre hjørne af redigeringstilstandsvinduet.
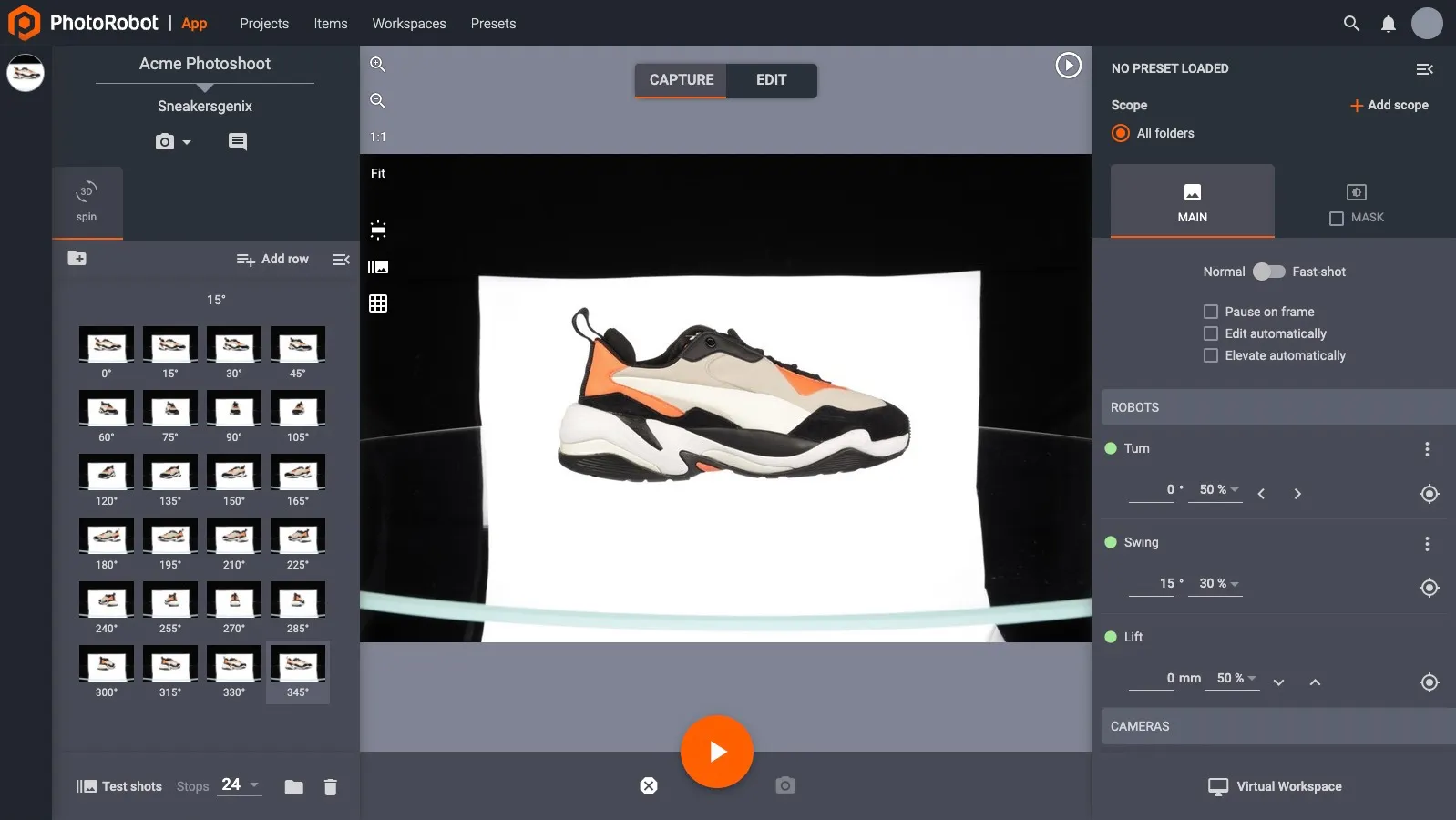
Oversigt over grænseflade til hentningstilstand
Den centrale del af capture mode interface omfatter preview vindue, som enten viser det aktuelt valgte billede (hvis du allerede har taget nogle) eller live view streamet fra kameraet.
Live View, som er nyttig, hvis du vil kontrollere fatningen og fokus, kan skiftes i kamerakontrolområdet i den centrale del af kontrolbjælken i højre side af skærmen.
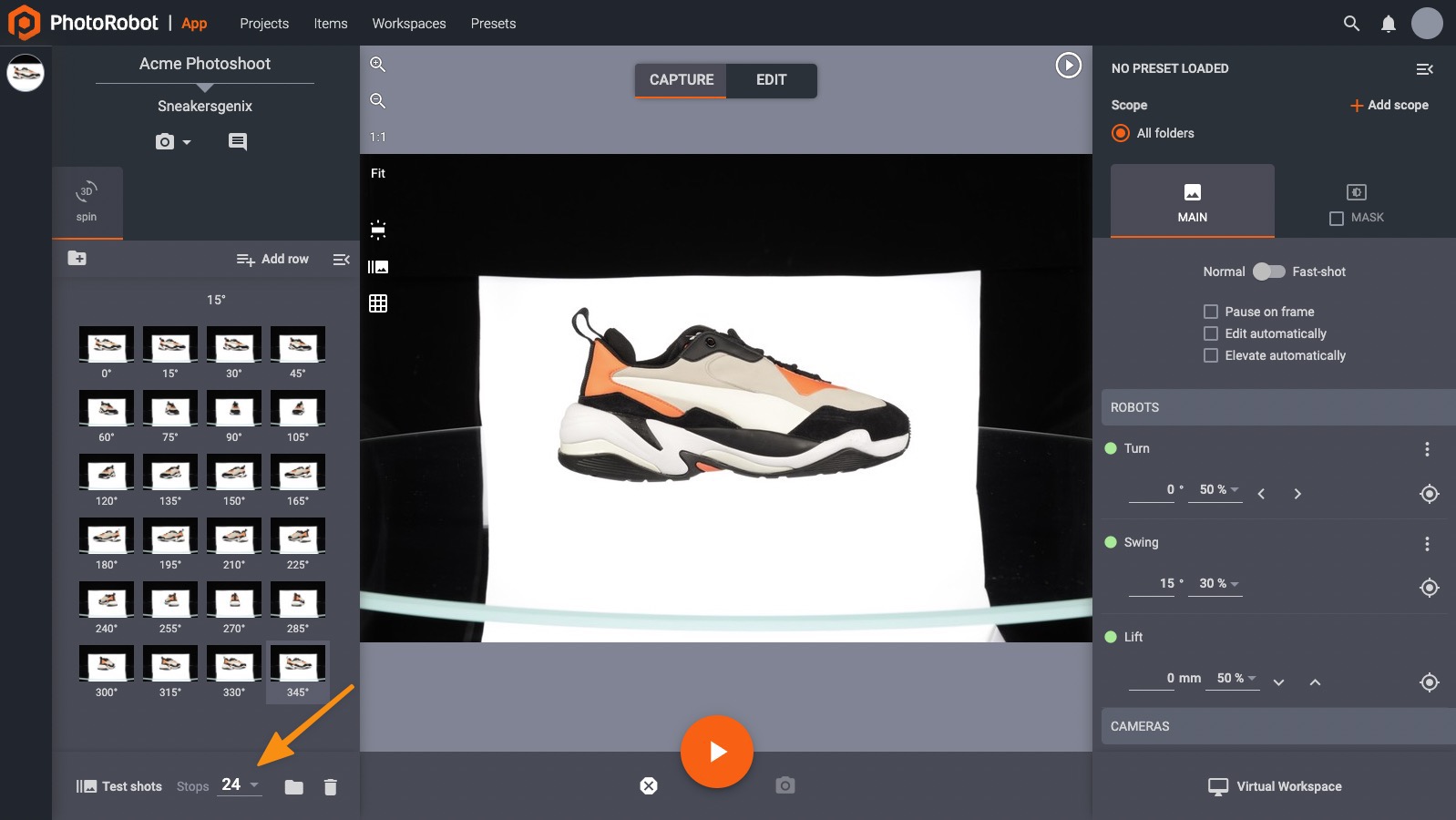
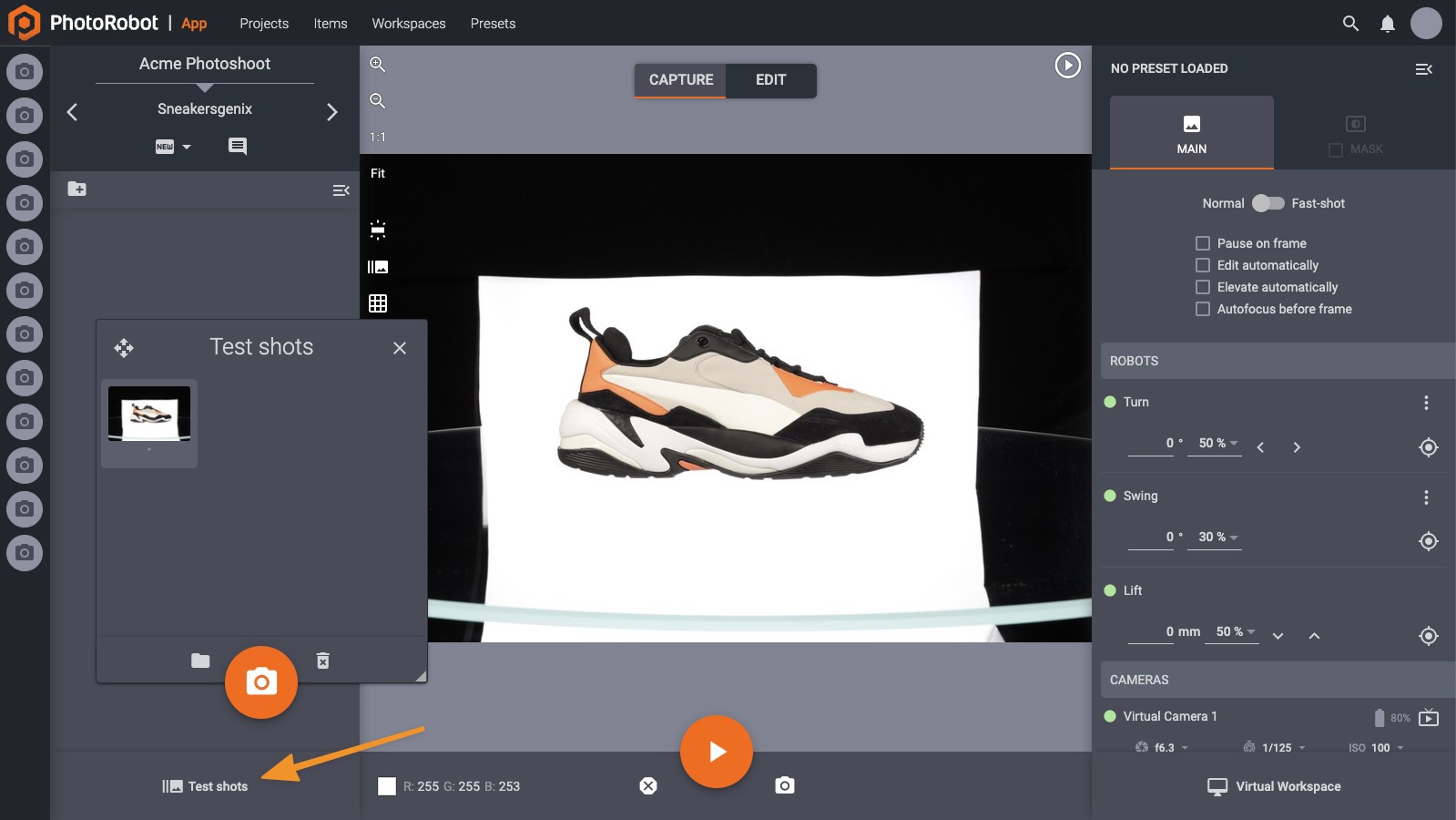
Tager test skud
Før du tager endelige billeder, er det en god ide at tage et eller flere testbilleder. Den nemmeste måde at gøre dette på er ved at trykke på T-tasten på computerens tastatur. Dette vil hjælpe dig med at kontrollere, om du skal ændre indstillingerne for dine lys, kamera osv. Testbilleder gemmes i mappen "testbillede", som du kan få adgang til nederst til venstre på skærmen.
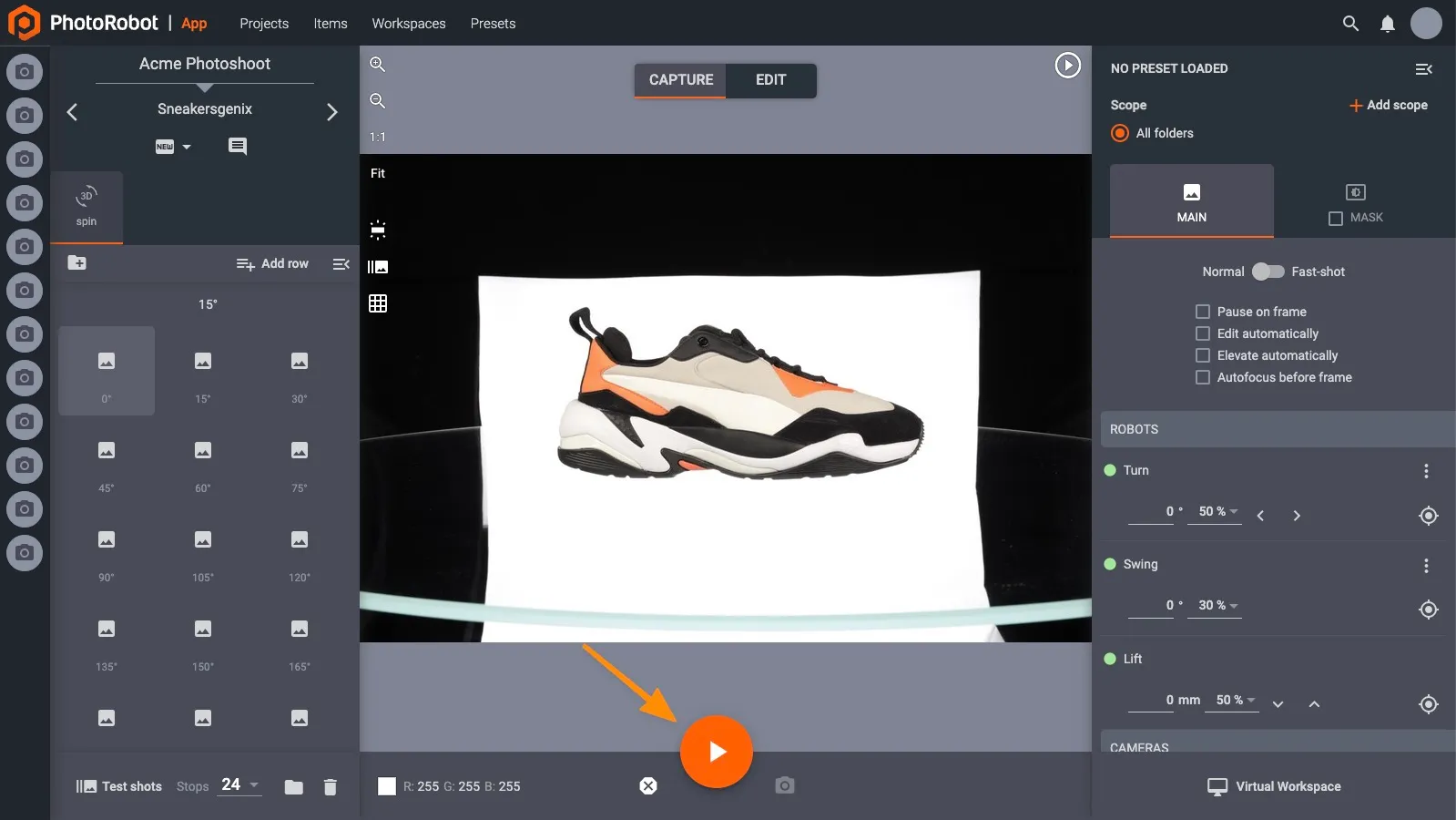
Start af en fotosekvens
Når tilfreds med indstillingerne, som blev verificeret ved at tage et testbillede, er det tid til at køre fotografering sekvens. Dette kan udløses ved at trykke på mellemrumstasten på tastaturet eller ved at klikke på knappen "Start", der vises på billedet nedenfor.
Hvis du har en stregkodescanner, kan du også udløse sekvensen ved at scanne en speciel "start"-stregkode. Download PhotoRobot "start"-stregkoden online, og udskriv den for at bruge denne funktion.

Du vil vide, at sekvensen er afsluttet med succes, hvis alle miniaturebilleder i venstre side er fyldt med billeder. Det er en god praksis at være opmærksom på eventuelle fejl i stroboskoplysene.
Hvis nogen af miniaturebillederne er mørkere sammenlignet med de andre, skal du sænke rotationshastigheden eller om nødvendigt kontrollere lysets tilstand. Du kan derefter markere disse billeder og skyde dem igen uden at skulle køre hele sekvensen igen.
Når hentningssekvensen er færdig, kan du skifte til redigeringstilstand, hvor du vil udføre efterbehandling.
PhotoRobot Macros
Makroer i CAPP giver brugerne mulighed for at definere kommandoer til hentningsprocessen for et element og dets mapper (spin, stillbilleder osv.). Kommandoer kan anvendes på individuelle eller flere mapper, køre sekvenser, billedredigeringer, arbejdsområder, forudindstillinger, kopiere billedindstillinger og flytte billedindstillinger. Brugere kan også tilpasse makroer yderligere efter navn, stregkode, mærke eller noter.
Bemærk: For detaljerede instruktioner om konfiguration og brug af PhotoRobot Macros, se PhotoRobot Macros brugervejledning. Find ud af, hvordan makroer muliggør fotografiautomatiseringsmagi på tværs af flere mapper og komponenter med automatisk behandling af komplekse opgaver.
PhotoRobot Wizards Mode
Wizards-tilstand i CAPP fungerer som et alternativ til manuel hardware-, kamera- og sekvenskonfiguration. I brug gør Wizards-tilstand det muligt for en administrator eller fotograf at oprette forskellige Wizards for at forenkle optagelsestilstand for produktionslinjeoperatører. En operatør kan derefter starte CAPP i Wizards-tilstand, som fungerer som en ekstremt simpel grænseflade med guidede trin. Der er også begrænsede kontroller for brugervenlighed og onboarding.
Efter at have oprettet en guide, gemmer den Presets og Workspace-konfigurationer samt foruddefinerede trin, som operatørerne skal følge. Operatører kan ikke justere nogen indstillinger, og de skal gennemføre instruktionerne i hvert trin, før de kan gå videre til næste proces.
Bemærk: Wizard-trin er defineret i et JavaScript-lignende sprogformat og scriptet af PhotoRobot-konsulenter for specialfunktionalitet. Brugere kan også scripte grundlæggende funktioner til indledende eksperimenter eller simple opsætninger. For dokumentation om teknisk konfiguration og brugerbrug af guider, se PhotoRobot Wizard Mode User Manual.
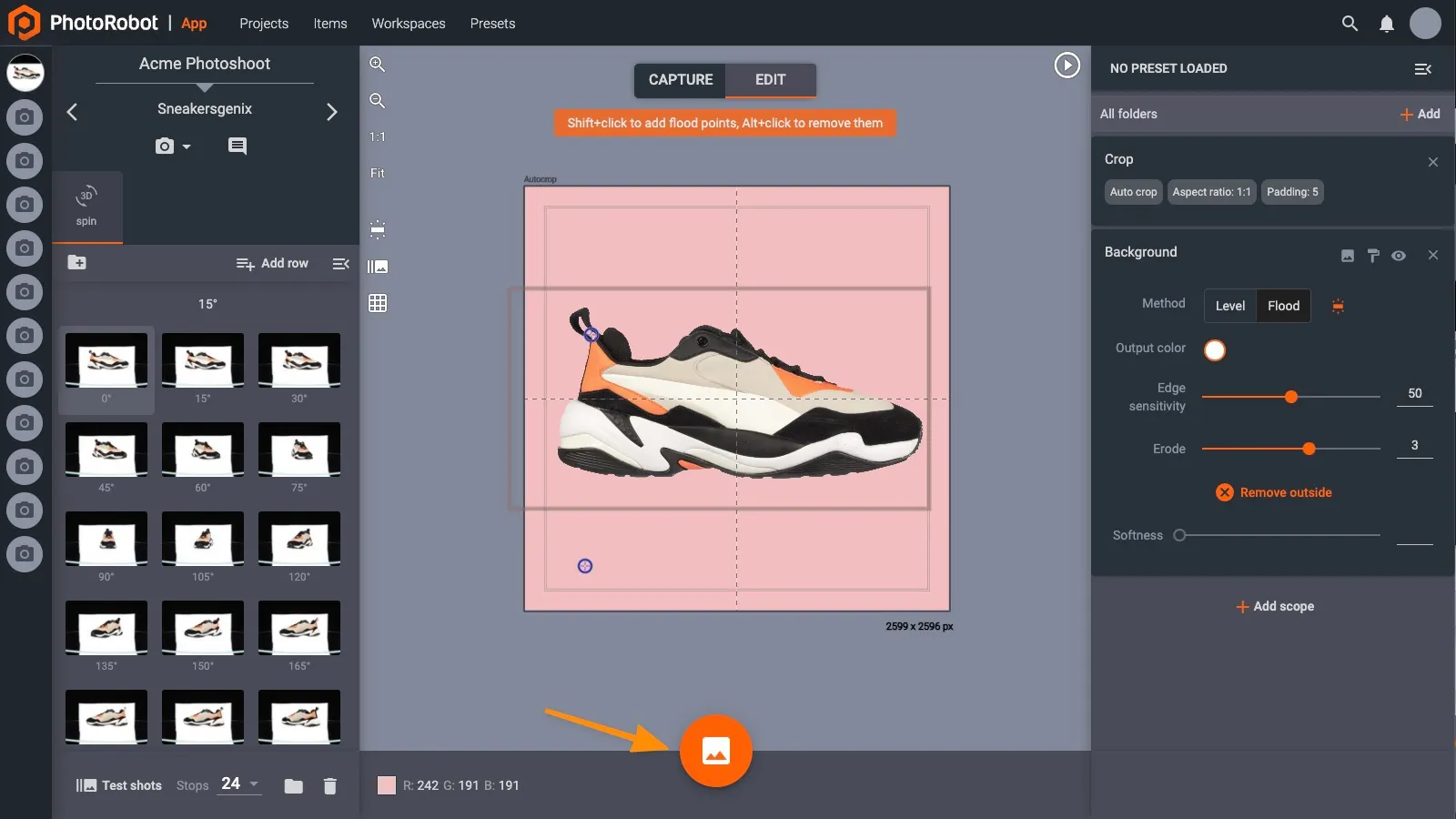
Brugergrænsefladen i redigeringstilstand
I højre side af skærmen kan du tilføje et vilkårligt antal redigeringshandlinger:
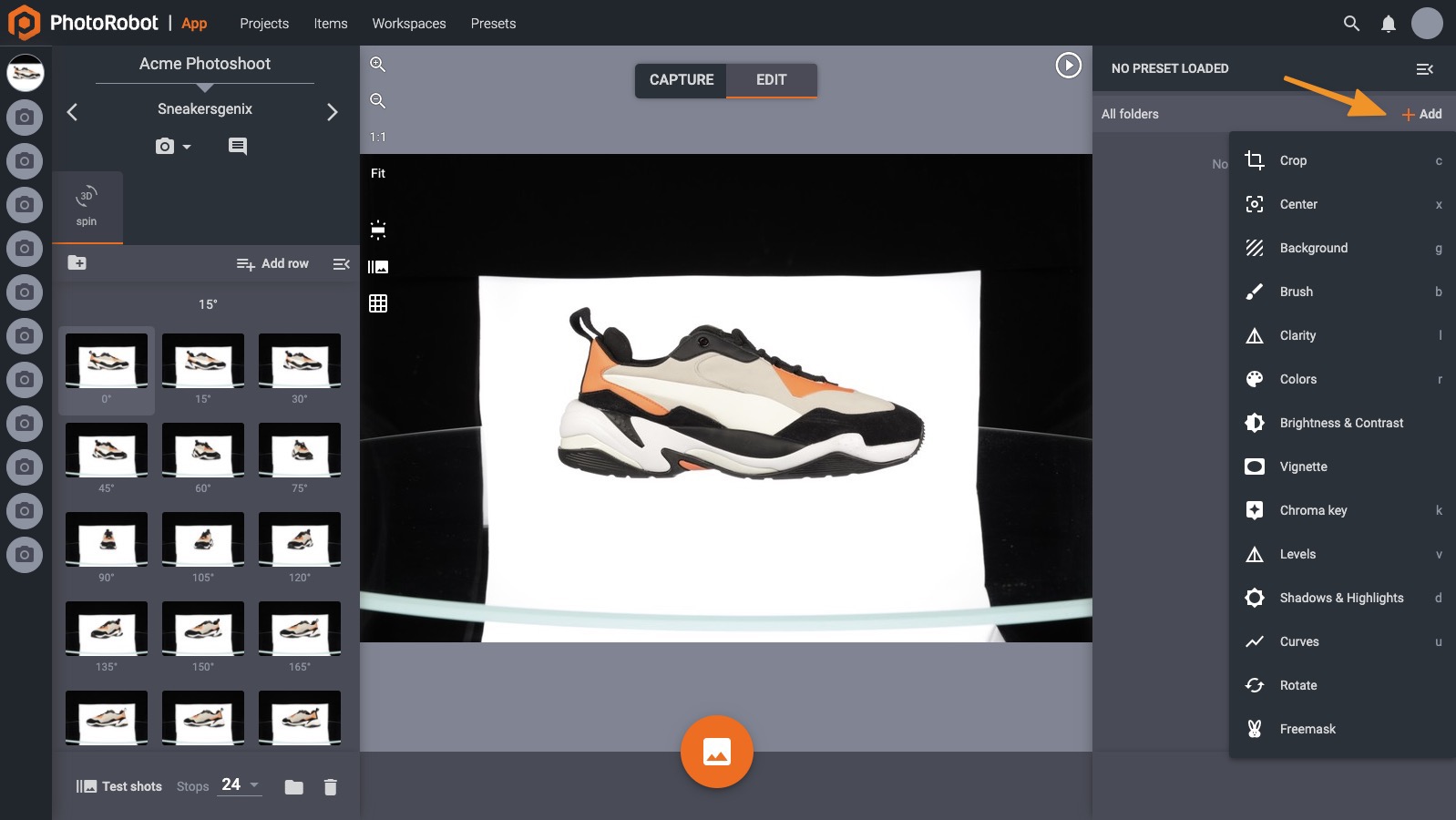
Nogle af de mest almindelige redigeringshandlinger vises øverst: beskær, centrer og baggrund.
Automatisk beskæring
Beskær - når du beskærer billeder, er der tre hovedkontrolelementer: til/fra-til-til-skæring, billedformat og polstring (som styrer, hvor meget plads der er omkring det fotograferede objekt).

Automatisk center
Center - selvom de fleste PhotoRobot maskiner er udstyret med lasere, der hjælper med at placere objekter på overfladen, skal de fleste billeder have yderligere softwarecentrering. Dette er især vigtigt for 360 ° spins. Når du kommer i gang, anbefales det at holde funktionen "auto center" tændt, som det ses på billedet nedenfor:
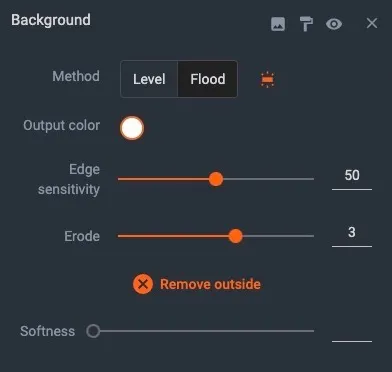
Fjernelse af baggrund
Baggrundsoperationen justerer baggrunden for et billede eller billedsæt og fjerner baggrunden fuldstændigt, hvis det ønskes. Forskellige resultater kan opnås ved hjælp af de tre forskellige metoder til fjernelse af baggrunden i CAPP. Der er baggrundsfjernelse efter niveau, baggrundsfjernelse ved oversvømmelse og ved frimaskering.
- Fjernelse af baggrund efter niveau bruger softwareanalyse af RGB-farveniveauer og lysstyrkeværdier til at identificere baggrunden og forgrunden. Dette er fordelagtigt, når du fotograferer lyse eller hvide genstande, og når du bruger en hvid baggrund. Juster niveauer i softwaren for at gøre baggrundens lysstyrke højere i intensitet, indtil den bliver ren hvid. Det er derefter muligt at gøre baggrunden gennemsigtig eller at bytte i forskellige farvebaggrunde.
- Fjernelse af baggrund ved oversvømmelse fungerer efter lignende principper som baggrundsfjernelse efter niveau og er oftest nyttig, når du fotograferer mørkere genstande. Hvis du fjerner baggrunden ved oversvømmelsen, bliver baggrundens lysstyrke mere intens, indtil den bliver helt hvid omkring emnet. Men i stedet for at justere niveauer, bruger værktøjet et valgt punkt til at identificere baggrunden og derefter "oversvømme" dette område. Brugere skal blot klikke på et punkt uden for det fotograferede objekt. Softwaren registrerer derefter kanterne af objektet og anvender oversvømmelse for at udfylde den tilgængelige plads omkring det.
- Frimaskering af baggrundsfjernelse kræver mere konfiguration end at bruge niveauer eller oversvømmelse, men det kan være en af de mest præcise og hurtigste metoder. Denne metode bruger et udskåret maskebillede og et hovedbillede af produktet, der sammensætter de to billeder for at fjerne baggrunden. Nogle gange er dette den eneste effektive måde at fjerne baggrunden omkring mere "vanskelige" objekter på. Tag for eksempel reflekterende genstande eller genstande, der indeholder områder med tom plads. Frimaskning identificerer objektet i forhold til alt tomt rum, mens baggrunden omkring elementet fjernes og inde i det, hvis det er nødvendigt. Metoden kræver dog yderligere konfiguration af studielys for at skabe hoved- og maskebilleder til fjernelse af baggrunden.
Seddel: Husk, at hvorvidt CAPP vil være i stand til at fjerne baggrunden eller ej, hovedsageligt afhænger af, hvordan scenen er oplyst. Hvis du ikke kan finde indstillinger, der fungerer tilfredsstillende, skal du tage billederne igen med forskellige lysindstillinger.
Når du er tilfreds med dine redigeringsindstillinger, skal du anvende parametrene ved at klikke på knappen "anvend", hvor knappen "start" tidligere dukkede op.
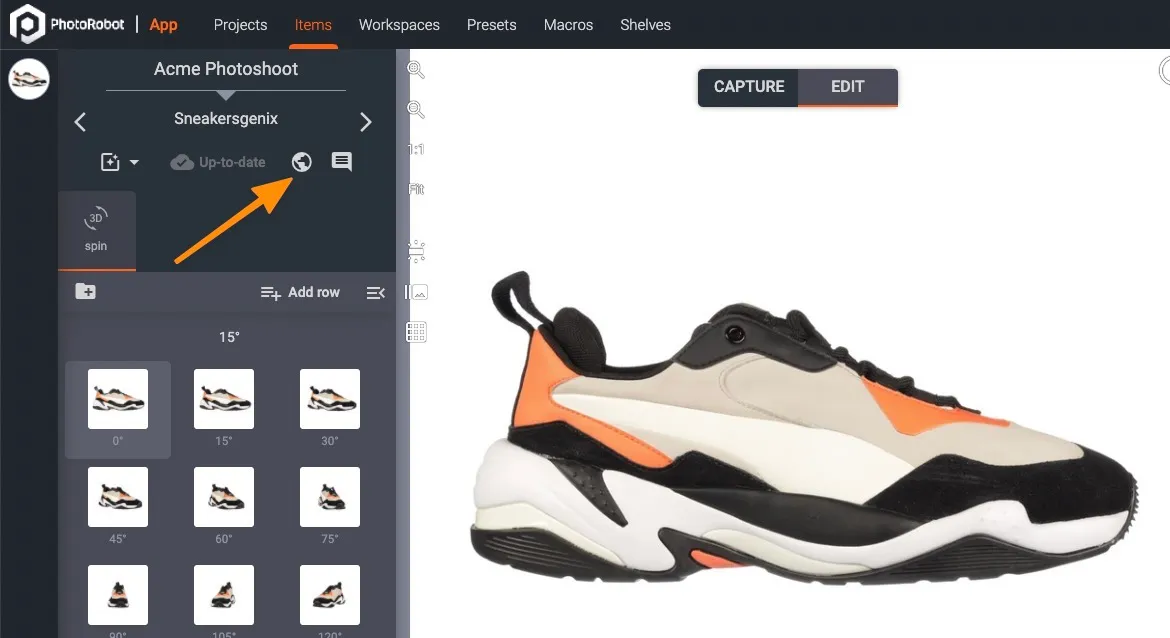
Udgivelse af billeder
Når statuslinjen er afsluttet, er dine ændringer blevet anvendt på dine billeder. Hvis du bruger CAPP uden PhotoRobot Cloud-tjenester, gemmes dine resulterende billeder i en mappestruktur på dit lokale drev.
Hvis du bruger PhotoRobot Cloud-hosting, kan filer også findes i PhotoRobot cloud-lagring. Hvis du vil have adgang til disse, skal du klikke på Åbn i skyen i sektionen Billeder øverst til venstre på skærmen.
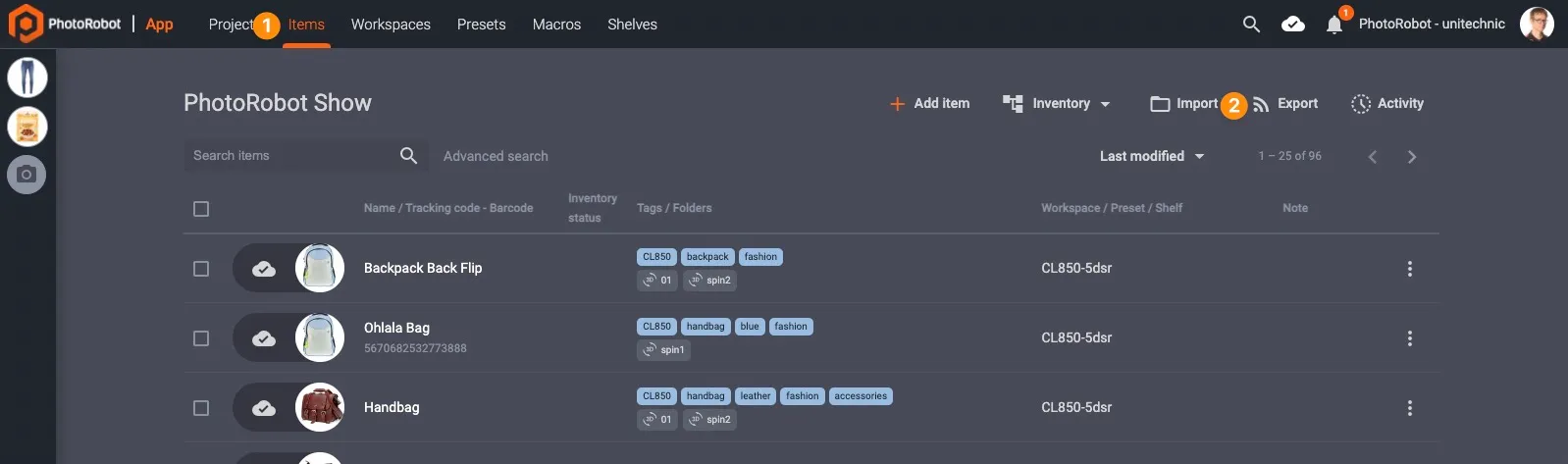
Eksportere billeder
For at eksportere et element fra CAPP kan brugerne eksportere til en lokal disk eller eksportere til PhotoRobot Cloud. Elementeksport gør det muligt at definere elementer med brugerdefinerede navngivningskonventioner, angive billedformat, opløsning og forskellige filnavnskabelonvariabler.
For at få adgang til indstillinger for elementeksport skal du gå til sektionen Elementer og klikke på Eksporter i menuen over elementlisten:
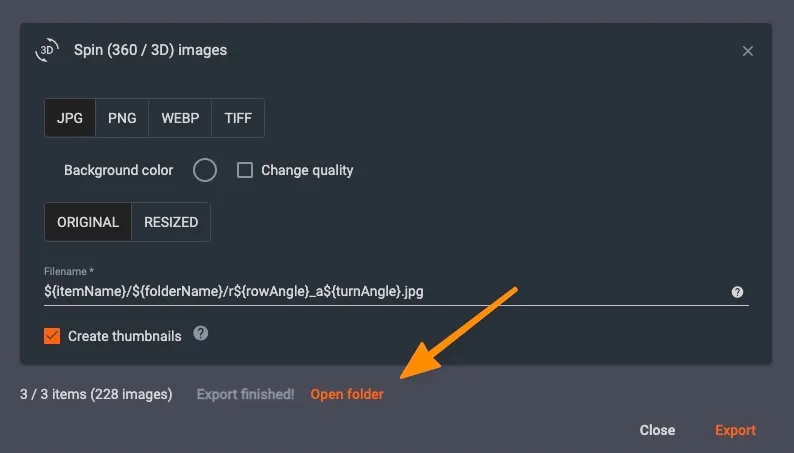
Følgende vindue åbnes, så du kan ændre eksportindstillingerne:
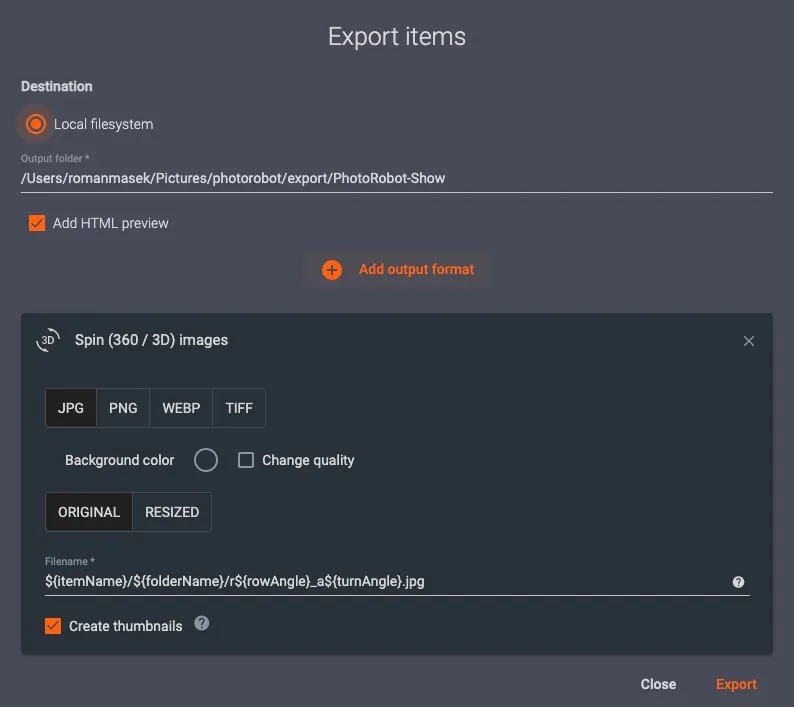
Kør eksportprocessen ved at klikke på knappen Eksporter i nederste højre hjørne af dette vindue.
Når statuslinjen for eksport er nået til sin afslutning, kan du klikke på Åbn mappe for at få adgang til de eksporterede billeder.
Udgiv via cloud
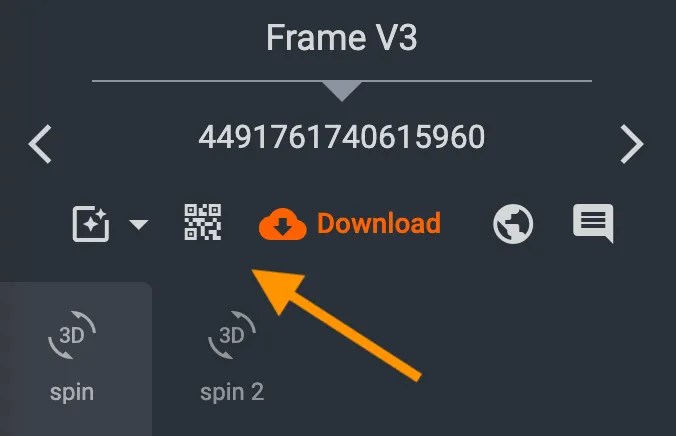
Hvis du udgiver via PhotoRobot Cloud-tjenester, skal du først åbne elementet i skyen. Grænsefladen viser det optagne billede. Klik på knappen Koder &kæder:
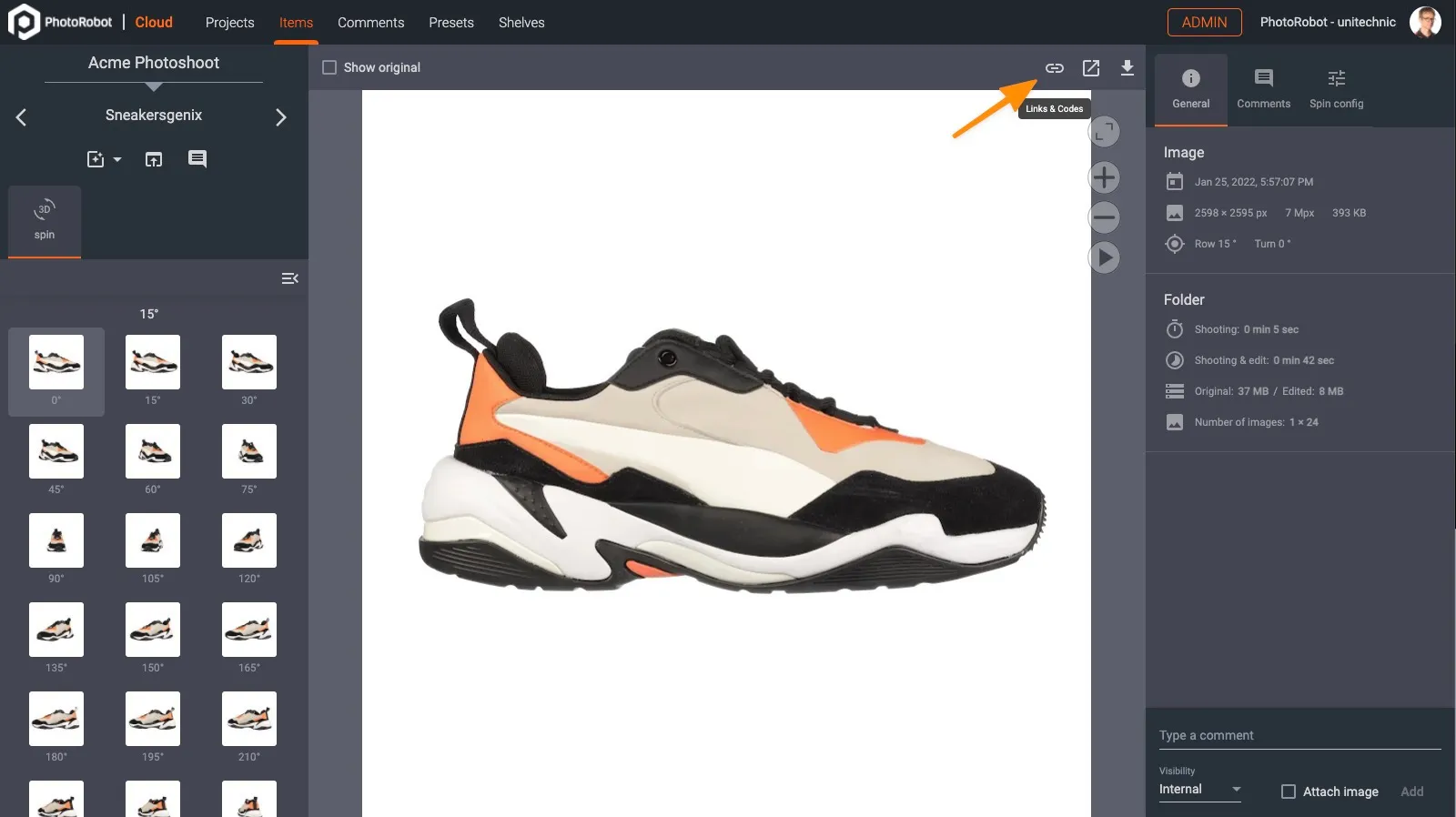
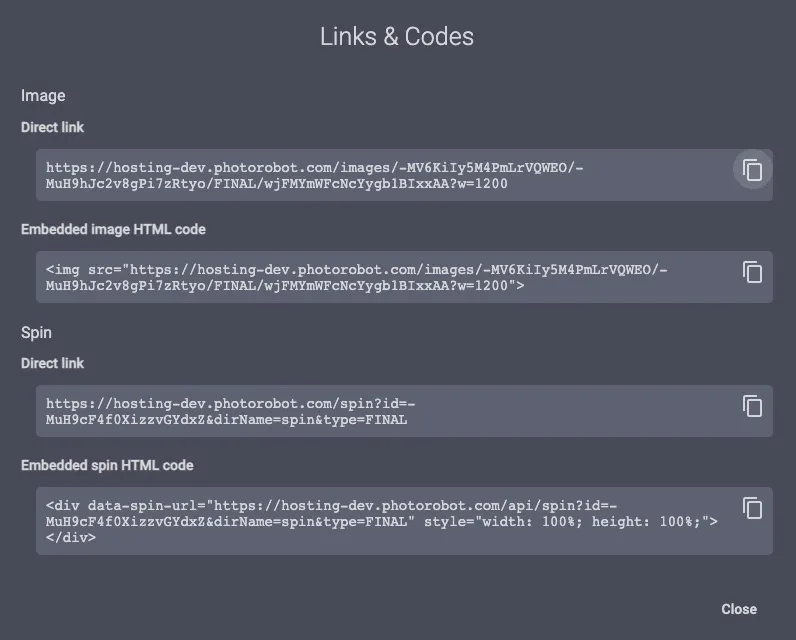
Kopier linket Direkte, og indsæt det i browseren for at se billedet eller spin. Indsæt denne kode på siden for at integrere spin til visning.


EOS Rebel-serien


EOS DSLR-serien


EOS M-serien af spejlløse kameraer


PowerShot-serien


Close-Up / Håndholdt

Canon EOS Rebel-serien tilbyder begyndervenlige DSLR-kameraer med solid billedkvalitet, intuitive kontroller og alsidige funktioner. Disse kameraer er ideelle til fotoentusiaster og giver pålidelig autofokus, berøringsskærme, der kan vippes og drejes, og Full HD- eller 4K-videooptagelse.
Forbindelse
Opløsning (MP)
Opløsning
Canon EOS DSLR-serien leverer billeder i høj kvalitet, hurtig autofokus og alsidighed, hvilket gør den ideel til både fotografering og videoproduktion.
Forbindelse
Opløsning (MP)
Opløsning
Canon EOS M-serien af spejlløse kameraer kombinerer kompakt design med DSLR-lignende ydeevne. Med udskiftelige objektiver, hurtig autofokus og billedsensorer af høj kvalitet er disse kameraer gode til rejsende og indholdsskabere, der søger bærbarhed uden at gå på kompromis med billedkvaliteten.
Forbindelse
Opløsning (MP)
Opløsning
Canon PowerShot-serien tilbyder kompakte, brugervenlige kameraer til afslappede fotografer og entusiaster. Med modeller, der spænder fra simple peg-og-skyd til avancerede zoomkameraer, giver de bekvemmelighed, solid billedkvalitet og funktioner som billedstabilisering og 4K-video.
Forbindelse
Opløsning (MP)
Opløsning
Canons nærbilleder og håndholdte kameraer er designet til detaljeret fotografering og video tæt på. De er kompakte og nemme at bruge og tilbyder præcisionsfokus, billedbehandling i høj opløsning og alsidige makrofunktioner – perfekt til vlogging, produktfotografering og kreative nærbilleder.


